 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Model-Base Control of Quadrupeds via Online System Identification using Kalman Filter
Jun 16, 2025Many real-world applications require legged robots to be able to carry variable payloads. Model-based controllers such as model predictive control (MPC) have become the de facto standard in research for controlling these systems. However, most model-based control architectures use fixed plant models, which limits their applicability to different tasks. In this paper, we present a Kalman filter (KF) formulation for online identification of the mass and center of mass (COM) of a four-legged robot. We evaluate our method on a quadrupedal robot carrying various payloads and find that it is more robust to strong measurement noise than classical recursive least squares (RLS) methods. Moreover, it improves the tracking performance of the model-based controller with varying payloads when the model parameters are adjusted at runtime.
Real-Time Model Predictive Control for the Swing-Up Problem of an Underactuated Double Pendulum
Apr 07, 2025The 3rd AI Olympics with RealAIGym competition poses the challenge of developing a global policy that can swing up and stabilize an underactuated 2-link system Acrobot and/or Pendubot from any configuration in the state space. This paper presents an optimal control-based approach using a real-time Nonlinear Model Predictive Control (MPC). The results show that the controller achieves good performance and robustness and can reliably handle disturbances.
Benchmarking Different QP Formulations and Solvers for Dynamic Quadrupedal Walking
Feb 03, 2025
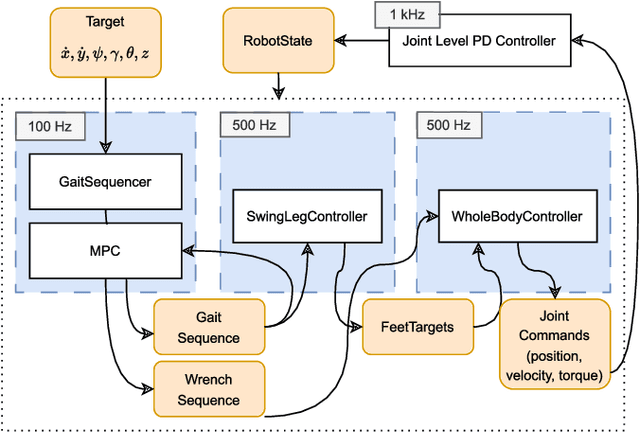
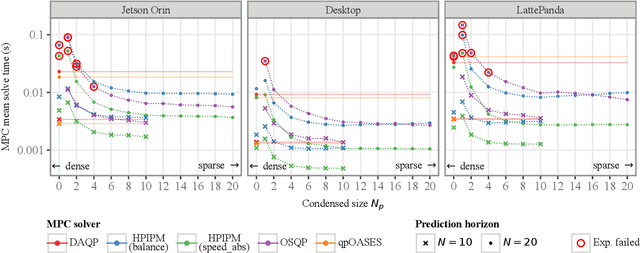
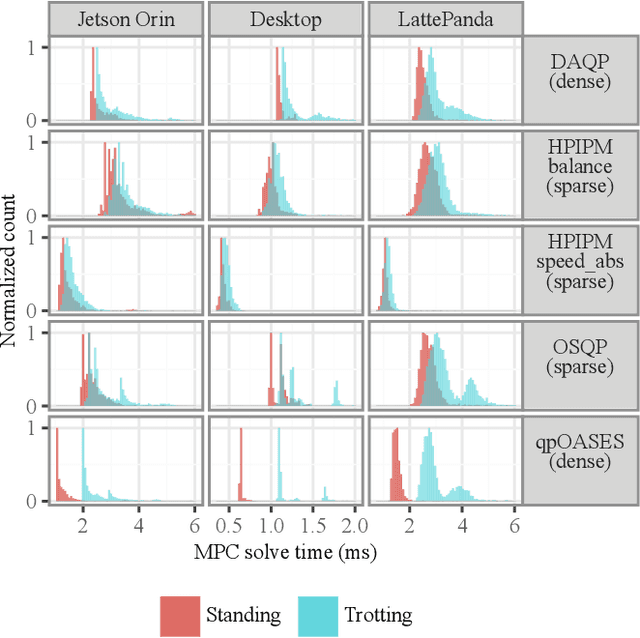
Quadratic Programs (QPs) are widely used in the control of walking robots, especially in Model Predictive Control (MPC) and Whole-Body Control (WBC). In both cases, the controller design requires the formulation of a QP and the selection of a suitable QP solver, both requiring considerable time and expertise. While computational performance benchmarks exist for QP solvers, studies comparing optimal combinations of computational hardware (HW), QP formulation, and solver performance are lacking. In this work, we compare dense and sparse QP formulations, and multiple solving methods on different HW architectures, focusing on their computational efficiency in dynamic walking of four legged robots using MPC. We introduce the Solve Frequency per Watt (SFPW) as a performance measure to enable a cross hardware comparison of the efficiency of QP solvers. We also benchmark different QP solvers for WBC that we use for trajectory stabilization in quadrupedal walking. As a result, this paper provides recommendations for the selection of QP formulations and solvers for different HW architectures in walking robots and indicates which problems should be devoted the greater technical effort in this domain in future.
Linear Model Predictive Control for a planar free-floating platform: A comparison of binary input constraint formulations
Dec 17, 2023



This work develops a first Model Predictive Control for European Space Agencies 3-dof free-floating platform. The challenges of the platform are the on/off thrusters, which cannot be actuated continuously and which are subject to certain timing constraints. This work compares penalty-term, Linear Complementarity Constraints, and classical Mixed Integer formulations in order to develop a controller that natively handles binary inputs. Furthermore, linear constraints are proposed which enforce the timing constraints. Only the Mixed Integer formulation turns out to work sufficiently. Hence, this work develops a new Mixed Integer MPC on the decoupled model of the platform. Feasibility analysis and simulation results show that for a short enough prediction horizon, this controller can (sub)optimally stabilize and control the system under consideration of the constraints in real-time.
"If you could see me through my eyes": Predicting Pedestrian Perception
Mar 22, 2022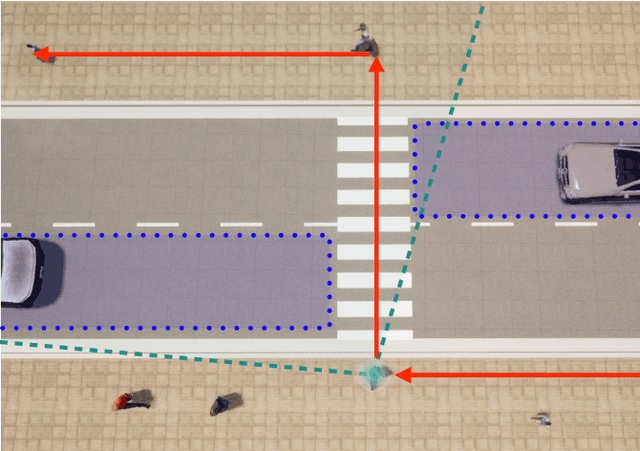
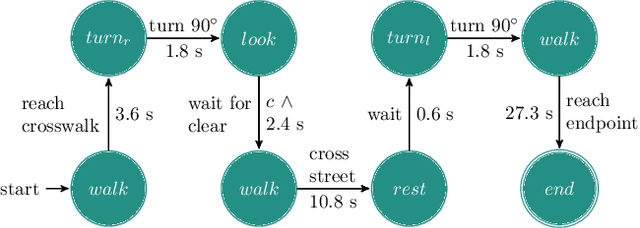
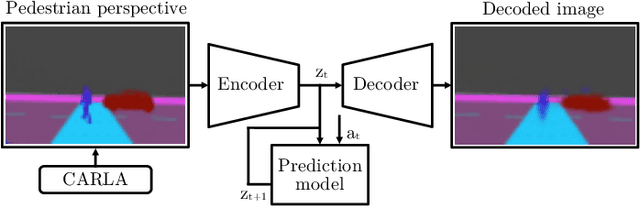
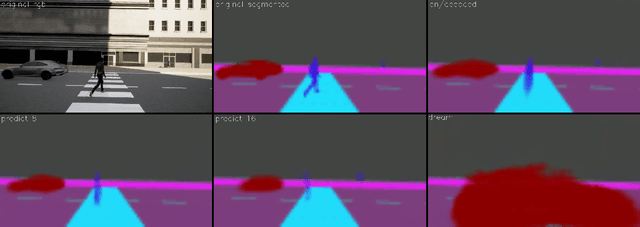
Pedestrians are particularly vulnerable road users in urban traffic. With the arrival of autonomous driving, novel technologies can be developed specifically to protect pedestrians. We propose a machine learning toolchain to train artificial neural networks as models of pedestrian behavior. In a preliminary study, we use synthetic data from simulations of a specific pedestrian crossing scenario to train a variational autoencoder and a long short-term memory network to predict a pedestrian's future visual perception. We can accurately predict a pedestrian's future perceptions within relevant time horizons. By iteratively feeding these predicted frames into these networks, they can be used as simulations of pedestrians as indicated by our results. Such trained networks can later be used to predict pedestrian behaviors even from the perspective of the autonomous car. Another future extension will be to re-train these networks with real-world video data.