 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning for Robust Athletic Intelligence: Lessons from the 2nd 'AI Olympics with RealAIGym' Competition
Mar 19, 2025In the field of robotics many different approaches ranging from classical planning over optimal control to reinforcement learning (RL) are developed and borrowed from other fields to achieve reliable control in diverse tasks. In order to get a clear understanding of their individual strengths and weaknesses and their applicability in real world robotic scenarios is it important to benchmark and compare their performances not only in a simulation but also on real hardware. The '2nd AI Olympics with RealAIGym' competition was held at the IROS 2024 conference to contribute to this cause and evaluate different controllers according to their ability to solve a dynamic control problem on an underactuated double pendulum system with chaotic dynamics. This paper describes the four different RL methods submitted by the participating teams, presents their performance in the swing-up task on a real double pendulum, measured against various criteria, and discusses their transferability from simulation to real hardware and their robustness to external disturbances.
Benchmarking Different QP Formulations and Solvers for Dynamic Quadrupedal Walking
Feb 03, 2025
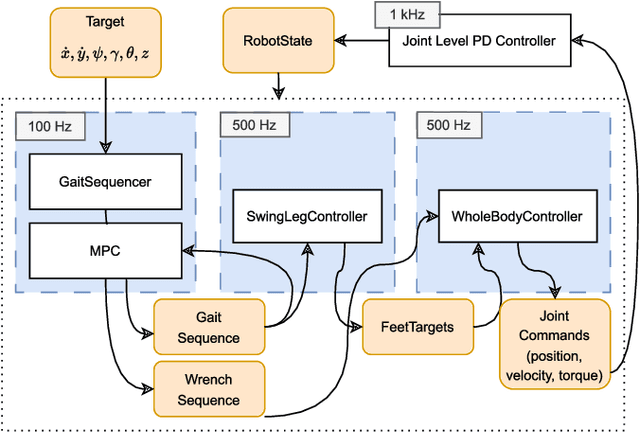
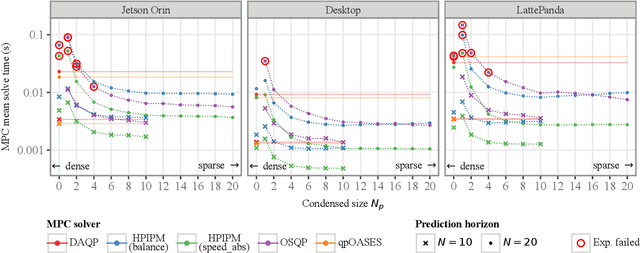
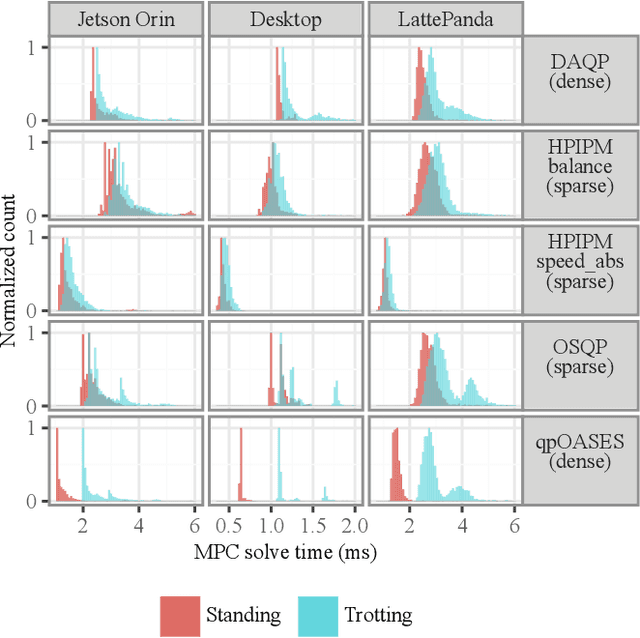
Quadratic Programs (QPs) are widely used in the control of walking robots, especially in Model Predictive Control (MPC) and Whole-Body Control (WBC). In both cases, the controller design requires the formulation of a QP and the selection of a suitable QP solver, both requiring considerable time and expertise. While computational performance benchmarks exist for QP solvers, studies comparing optimal combinations of computational hardware (HW), QP formulation, and solver performance are lacking. In this work, we compare dense and sparse QP formulations, and multiple solving methods on different HW architectures, focusing on their computational efficiency in dynamic walking of four legged robots using MPC. We introduce the Solve Frequency per Watt (SFPW) as a performance measure to enable a cross hardware comparison of the efficiency of QP solvers. We also benchmark different QP solvers for WBC that we use for trajectory stabilization in quadrupedal walking. As a result, this paper provides recommendations for the selection of QP formulations and solvers for different HW architectures in walking robots and indicates which problems should be devoted the greater technical effort in this domain in future.
MARLIN: A Cloud Integrated Robotic Solution to Support Intralogistics in Retail
Jul 02, 2024In this paper, we present the service robot MARLIN and its integration with the K4R platform, a cloud system for complex AI applications in retail. At its core, this platform contains so-called semantic digital twins, a semantically annotated representation of the retail store. MARLIN continuously exchanges data with the K4R platform, improving the robot's capabilities in perception, autonomous navigation, and task planning. We exploit these capabilities in a retail intralogistics scenario, specifically by assisting store employees in stocking shelves. We demonstrate that MARLIN is able to update the digital representation of the retail store by detecting and classifying obstacles, autonomously planning and executing replenishment missions, adapting to unforeseen changes in the environment, and interacting with store employees. Experiments are conducted in simulation, in a laboratory environment, and in a real store. We also describe and evaluate a novel algorithm for autonomous navigation of articulated tractor-trailer systems. The algorithm outperforms the manufacturer's proprietary navigation approach and improves MARLIN's navigation capabilities in confined spaces.
Online-Adaptive Anomaly Detection for Defect Identification in Aircraft Assembly
Jun 18, 2024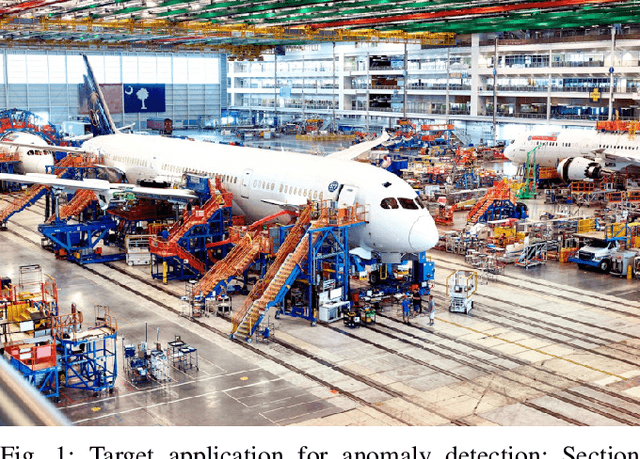
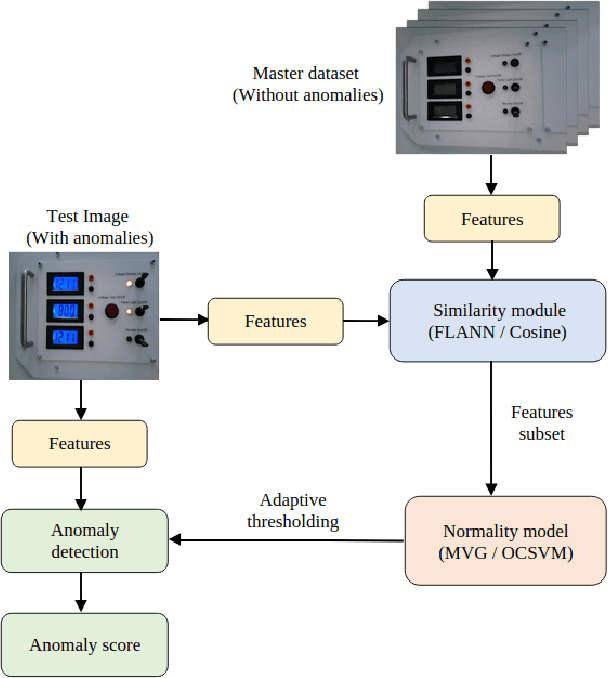
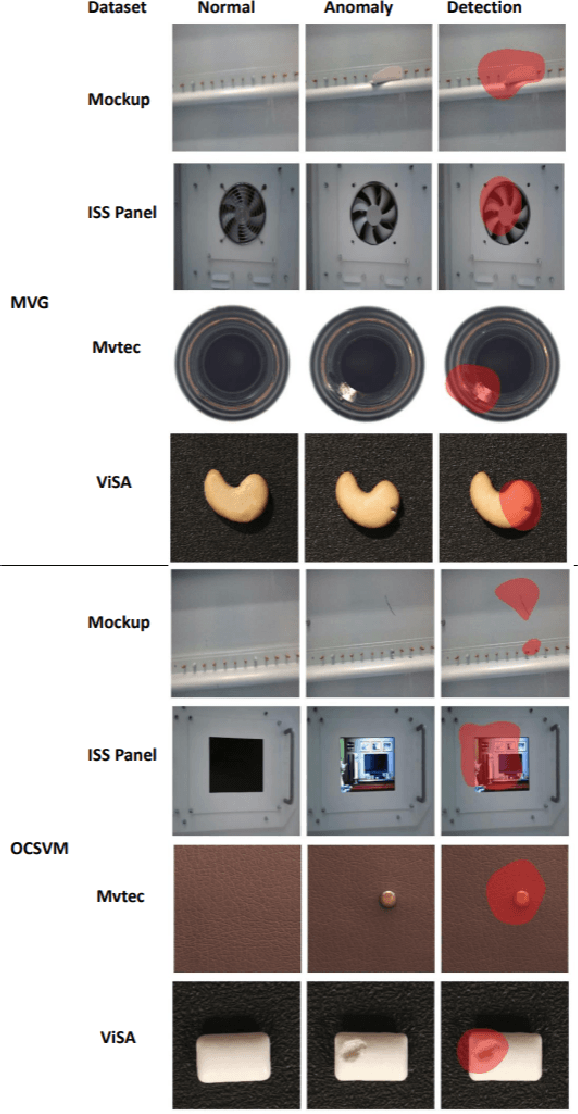
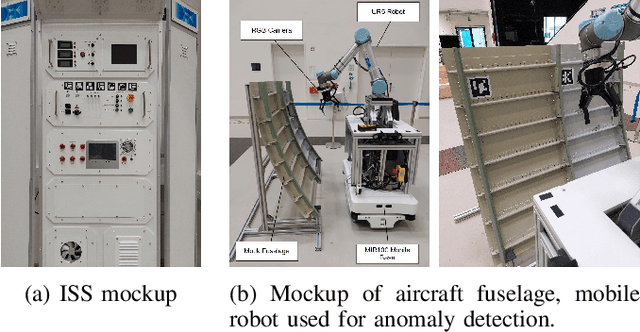
Anomaly detection deals with detecting deviations from established patterns within data. It has various applications like autonomous driving, predictive maintenance, and medical diagnosis. To improve anomaly detection accuracy, transfer learning can be applied to large, pre-trained models and adapt them to the specific application context. In this paper, we propose a novel framework for online-adaptive anomaly detection using transfer learning. The approach adapts to different environments by selecting visually similar training images and online fitting a normality model to EfficientNet features extracted from the training subset. Anomaly detection is then performed by computing the Mahalanobis distance between the normality model and the test image features. Different similarity measures (SIFT/FLANN, Cosine) and normality models (MVG, OCSVM) are employed and compared with each other. We evaluate the approach on different anomaly detection benchmarks and data collected in controlled laboratory settings. Experimental results showcase a detection accuracy exceeding 0.975, outperforming the state-of-the-art ET-NET approach.
Learning Context-Adaptive Task Constraints for Robotic Manipulation
Aug 06, 2020
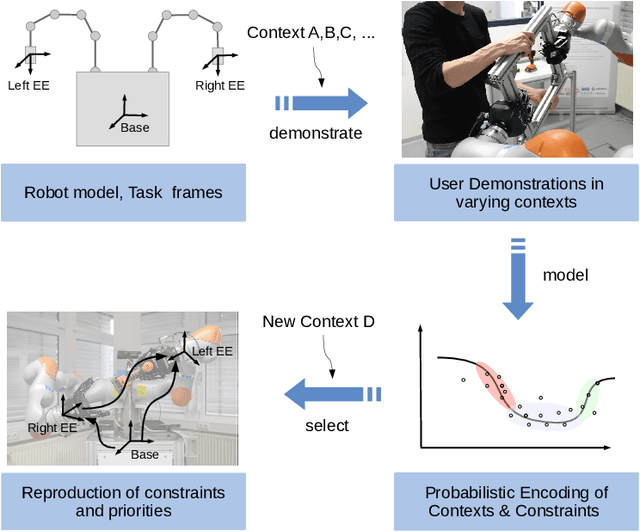
Constraint-based control approaches offer a flexible way to specify robotic manipulation tasks and execute them on robots with many degrees of freedom. However, the specification of task constraints and their associated priorities usually requires a human-expert and often leads to tailor-made solutions for specific situations. This paper presents our recent efforts to automatically derive task constraints for a constraint-based robot controller from data and adapt them with respect to previously unseen situations (contexts). We use a programming-by-demonstration approach to generate training data in multiple variations (context changes) of a given task. From this data we learn a probabilistic model that maps context variables to task constraints and their respective soft task priorities. We evaluate our approach with 3 different dual-arm manipulation tasks on an industrial robot and show that it performs better in terms of reproduction accuracy than constraint-based controllers with manually specified constraints.