 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContingency Model-based Control (CMC) for Communicationless Cooperative Collision Avoidance in Robot Swarms
Dec 23, 2025Cooperative collision avoidance between robots in swarm operations remains an open challenge. Assuming a decentralized architecture, each robot is responsible for making its own control decisions, including motion planning. To this end, most existing approaches mostly rely some form of (wireless) communication between the agents of the swarm. In reality, however, communication is brittle. It may be affected by latency, further delays and packet losses, transmission faults, and is subject to adversarial attacks, such as jamming or spoofing. This paper proposes Contingency Model-based Control (CMC) as a communicationless alternative. It follows the implicit cooperation paradigm, under which the design of the robots is based on consensual (offline) rules, similar to traffic rules. They include the definition of a contingency trajectory for each robot, and a method for construction of mutual collision avoidance constraints. The setup is shown to guarantee the recursive feasibility and collision avoidance between all swarm members in closed-loop operation. Moreover, CMC naturally satisfies the Plug \& Play paradigm, i.e., for new robots entering the swarm. Two numerical examples demonstrate that the collision avoidance guarantee is intact and that the robot swarm operates smoothly under the CMC regime.
Hierarchical Reinforcement Learning with Low-Level MPC for Multi-Agent Control
Sep 19, 2025Achieving safe and coordinated behavior in dynamic, constraint-rich environments remains a major challenge for learning-based control. Pure end-to-end learning often suffers from poor sample efficiency and limited reliability, while model-based methods depend on predefined references and struggle to generalize. We propose a hierarchical framework that combines tactical decision-making via reinforcement learning (RL) with low-level execution through Model Predictive Control (MPC). For the case of multi-agent systems this means that high-level policies select abstract targets from structured regions of interest (ROIs), while MPC ensures dynamically feasible and safe motion. Tested on a predator-prey benchmark, our approach outperforms end-to-end and shielding-based RL baselines in terms of reward, safety, and consistency, underscoring the benefits of combining structured learning with model-based control.
World Models for Anomaly Detection during Model-Based Reinforcement Learning Inference
Mar 04, 2025Learning-based controllers are often purposefully kept out of real-world applications due to concerns about their safety and reliability. We explore how state-of-the-art world models in Model-Based Reinforcement Learning can be utilized beyond the training phase to ensure a deployed policy only operates within regions of the state-space it is sufficiently familiar with. This is achieved by continuously monitoring discrepancies between a world model's predictions and observed system behavior during inference. It allows for triggering appropriate measures, such as an emergency stop, once an error threshold is surpassed. This does not require any task-specific knowledge and is thus universally applicable. Simulated experiments on established robot control tasks show the effectiveness of this method, recognizing changes in local robot geometry and global gravitational magnitude. Real-world experiments using an agile quadcopter further demonstrate the benefits of this approach by detecting unexpected forces acting on the vehicle. These results indicate how even in new and adverse conditions, safe and reliable operation of otherwise unpredictable learning-based controllers can be achieved.
On the Application of Model Predictive Control to a Weighted Coverage Path Planning Problem
Nov 13, 2024



This paper considers the application of Model Predictive Control (MPC) to a weighted coverage path planning (WCPP) problem. The problem appears in a wide range of practical applications, such as search and rescue (SAR) missions. The basic setup is that one (or multiple) agents can move around a given search space and collect rewards from a given spatial distribution. Unlike an artificial potential field, each reward can only be collected once. In contrast to a Traveling Salesman Problem (TSP), the agent moves in a continuous space. Moreover, he is not obliged to cover all locations and/or may return to previously visited locations. The WCPP problem is tackled by a new Model Predictive Control (MPC) formulation with so-called Coverage Constraints (CCs). It is shown that the solution becomes more effective if the solver is initialized with a TSP-based heuristic. With and without this initialization, the proposed MPC approach clearly outperforms a naive MPC formulation, as demonstrated in a small simulation study.
Traffic and Safety Rule Compliance of Humans in Diverse Driving Situations
Nov 04, 2024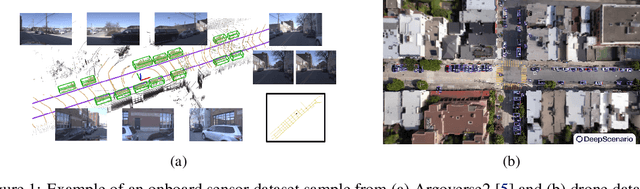
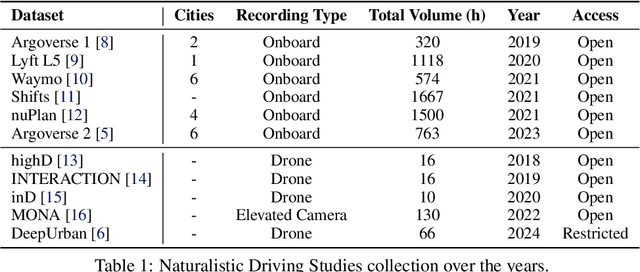
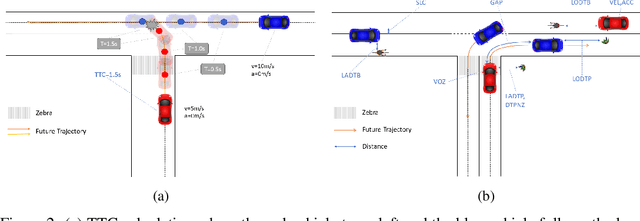
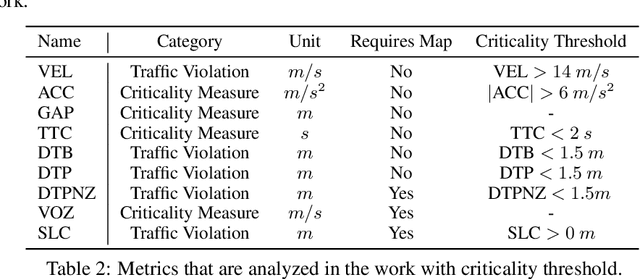
The increasing interest in autonomous driving systems has highlighted the need for an in-depth analysis of human driving behavior in diverse scenarios. Analyzing human data is crucial for developing autonomous systems that replicate safe driving practices and ensure seamless integration into human-dominated environments. This paper presents a comparative evaluation of human compliance with traffic and safety rules across multiple trajectory prediction datasets, including Argoverse 2, nuPlan, Lyft, and DeepUrban. By defining and leveraging existing safety and behavior-related metrics, such as time to collision, adherence to speed limits, and interactions with other traffic participants, we aim to provide a comprehensive understanding of each datasets strengths and limitations. Our analysis focuses on the distribution of data samples, identifying noise, outliers, and undesirable behaviors exhibited by human drivers in both the training and validation sets. The results underscore the need for applying robust filtering techniques to certain datasets due to high levels of noise and the presence of such undesirable behaviors.
Analysis of Functional Insufficiencies and Triggering Conditions to Improve the SOTIF of an MPC-based Trajectory Planner
Aug 01, 2024Automated and autonomous driving has made a significant technological leap over the past decade. In this process, the complexity of algorithms used for vehicle control has grown significantly. Model Predictive Control (MPC) is a prominent example, which has gained enormous popularity and is now widely used for vehicle motion planning and control. However, safety concerns constrain its practical application, especially since traditional procedures of functional safety (FS), with its universal standard ISO26262, reach their limits. Concomitantly, the new aspect of safety-of-the-intended-function (SOTIF) has moved into the center of attention, whose standard, ISO21448, has only been released in 2022. Thus, experience with SOTIF is low and few case studies are available in industry and research. Hence this paper aims to make two main contributions: (1) an analysis of the SOTIF for a generic MPC-based trajectory planner and (2) an interpretation and concrete application of the generic procedures described in ISO21448 for determining functional insufficiencies (FIs) and triggering conditions (TCs). Particular novelties of the paper include an approach for the out-of-context development of SOTIF-related elements (SOTIF-EooC), a compilation of important FIs and TCs for a MPC-based trajectory planner, and an optimized safety concept based on the identified FIs and TCs for the MPC-based trajectory planner.
ROS2swarm - A ROS 2 Package for Swarm Robot Behaviors
May 03, 2024Developing reusable software for mobile robots is still challenging. Even more so for swarm robots, despite the desired simplicity of the robot controllers. Prototyping and experimenting are difficult due to the multi-robot setting and often require robot-robot communication. Also, the diversity of swarm robot hardware platforms increases the need for hardware-independent software concepts. The main advantages of the commonly used robot software architecture ROS 2 are modularity and platform independence. We propose a new ROS 2 package, ROS2swarm, for applications of swarm robotics that provides a library of ready-to-use swarm behavioral primitives. We show the successful application of our approach on three different platforms, the TurtleBot3 Burger, the TurtleBot3 Waffle Pi, and the Jackal UGV, and with a set of different behavioral primitives, such as aggregation, dispersion, and collective decision-making. The proposed approach is easy to maintain, extendable, and has good potential for simplifying swarm robotics experiments in future applications.
Linear Model Predictive Control for a planar free-floating platform: A comparison of binary input constraint formulations
Dec 17, 2023



This work develops a first Model Predictive Control for European Space Agencies 3-dof free-floating platform. The challenges of the platform are the on/off thrusters, which cannot be actuated continuously and which are subject to certain timing constraints. This work compares penalty-term, Linear Complementarity Constraints, and classical Mixed Integer formulations in order to develop a controller that natively handles binary inputs. Furthermore, linear constraints are proposed which enforce the timing constraints. Only the Mixed Integer formulation turns out to work sufficiently. Hence, this work develops a new Mixed Integer MPC on the decoupled model of the platform. Feasibility analysis and simulation results show that for a short enough prediction horizon, this controller can (sub)optimally stabilize and control the system under consideration of the constraints in real-time.
Using Deep Reinforcement Learning with Automatic Curriculum Learning for Mapless Navigation in Intralogistics
Mar 16, 2022
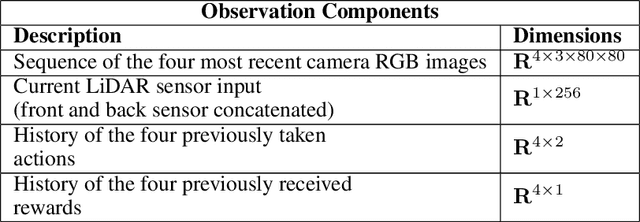
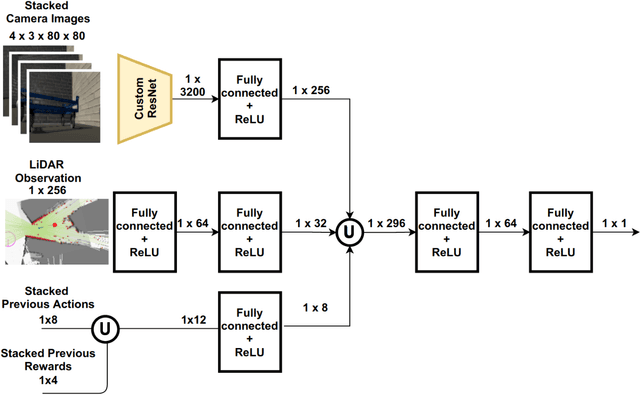
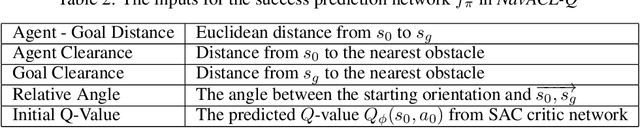
We propose a deep reinforcement learning approach for solving a mapless navigation problem in warehouse scenarios. In our approach, an automation guided vehicle is equipped with LiDAR and frontal RGB sensors and learns to perform a targeted navigation task. The challenges reside in the sparseness of positive samples for learning, multi-modal sensor perception with partial observability, the demand for accurate steering maneuvers together with long training cycles. To address these points, we propose NavACL-Q as a method for automatic curriculum learning in combination with a distributed version of the soft actor-critic algorithm. The performance of the learning algorithm is evaluated exhaustively in an unseen warehouse environment to validate both robustness and generalizability of the learned policy. Results in NVIDIA Isaac Sim demonstrates that our trained agent significantly outperforms a map-based navigation pipeline provided by NVIDIA Isaac Sim with an increased agent-goal distance of 3m and wider initial relative agent-goal rotations of 45 degree. The ablation studies also suggests that NavACL-Q greatly facilitates the learning process with a performance gain of roughly 40% compared to training with random starts and that the utilization of a pre-trained feature extractor manifestly boosts the performance by approximately 60%.
On the Application of ISO 26262 in Control Design for Automated Vehicles
Apr 12, 2018
Research on automated vehicles has experienced an explosive growth over the past decade. A main obstacle to their practical realization, however, is a convincing safety concept. This question becomes ever more important as more sophisticated algorithms are used and the vehicle automation level increases. The field of functional safety offers a systematic approach to identify possible sources of risk and to improve the safety of a vehicle. It is based on practical experience across the aerospace, process and other industries over multiple decades. This experience is compiled in the functional safety standard for the automotive domain, ISO 26262, which is widely adopted throughout the automotive industry. However, its applicability and relevance for highly automated vehicles is subject to a controversial debate. This paper takes a critical look at the discussion and summarizes the main steps of ISO 26262 for a safe control design for automated vehicles.
* In Proceedings SCAV 2018, arXiv:1804.03406