 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Deep Reinforcement Learning with Automatic Curriculum Learning for Mapless Navigation in Intralogistics
Paper and Code

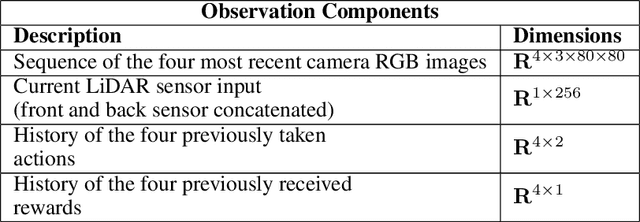
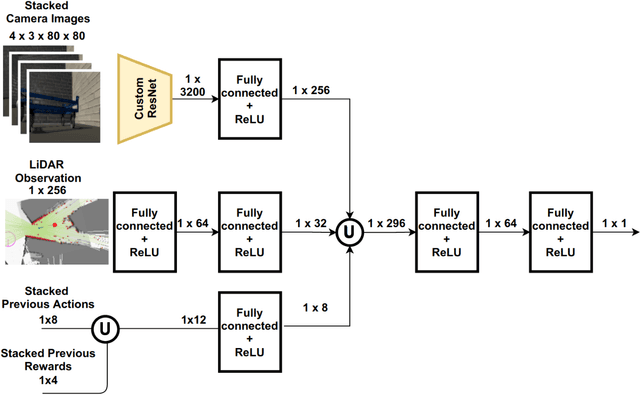
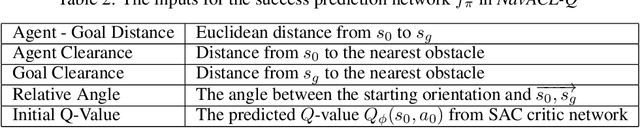
We propose a deep reinforcement learning approach for solving a mapless navigation problem in warehouse scenarios. In our approach, an automation guided vehicle is equipped with LiDAR and frontal RGB sensors and learns to perform a targeted navigation task. The challenges reside in the sparseness of positive samples for learning, multi-modal sensor perception with partial observability, the demand for accurate steering maneuvers together with long training cycles. To address these points, we propose NavACL-Q as a method for automatic curriculum learning in combination with a distributed version of the soft actor-critic algorithm. The performance of the learning algorithm is evaluated exhaustively in an unseen warehouse environment to validate both robustness and generalizability of the learned policy. Results in NVIDIA Isaac Sim demonstrates that our trained agent significantly outperforms a map-based navigation pipeline provided by NVIDIA Isaac Sim with an increased agent-goal distance of 3m and wider initial relative agent-goal rotations of 45 degree. The ablation studies also suggests that NavACL-Q greatly facilitates the learning process with a performance gain of roughly 40% compared to training with random starts and that the utilization of a pre-trained feature extractor manifestly boosts the performance by approximately 60%.