 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Deep Reinforcement Learning with Automatic Curriculum Learning for Mapless Navigation in Intralogistics
Mar 16, 2022
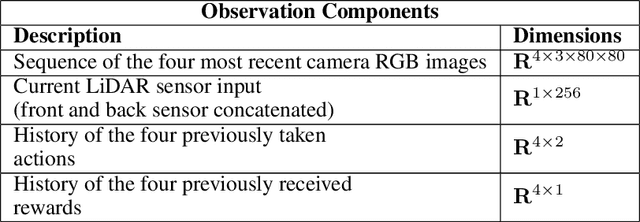
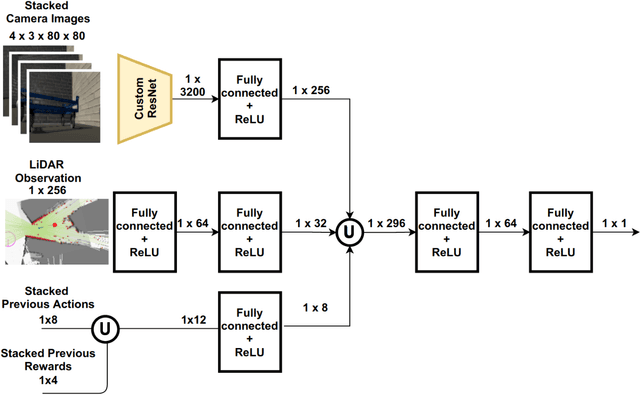
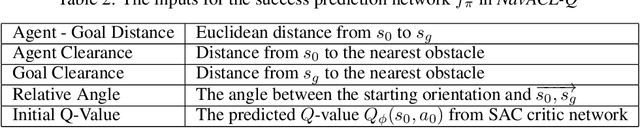
We propose a deep reinforcement learning approach for solving a mapless navigation problem in warehouse scenarios. In our approach, an automation guided vehicle is equipped with LiDAR and frontal RGB sensors and learns to perform a targeted navigation task. The challenges reside in the sparseness of positive samples for learning, multi-modal sensor perception with partial observability, the demand for accurate steering maneuvers together with long training cycles. To address these points, we propose NavACL-Q as a method for automatic curriculum learning in combination with a distributed version of the soft actor-critic algorithm. The performance of the learning algorithm is evaluated exhaustively in an unseen warehouse environment to validate both robustness and generalizability of the learned policy. Results in NVIDIA Isaac Sim demonstrates that our trained agent significantly outperforms a map-based navigation pipeline provided by NVIDIA Isaac Sim with an increased agent-goal distance of 3m and wider initial relative agent-goal rotations of 45 degree. The ablation studies also suggests that NavACL-Q greatly facilitates the learning process with a performance gain of roughly 40% compared to training with random starts and that the utilization of a pre-trained feature extractor manifestly boosts the performance by approximately 60%.
Using Probabilistic Movement Primitives in Analyzing Human Motion Difference under Transcranial Current Stimulation
Jul 05, 2021
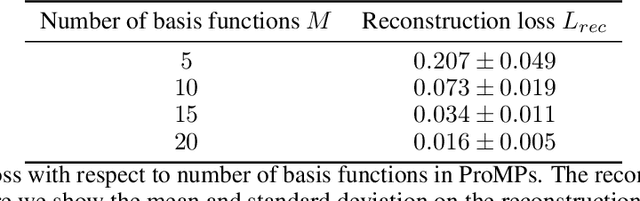
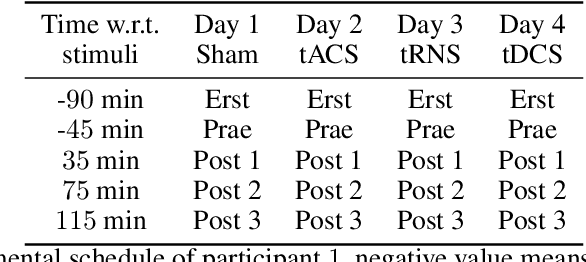
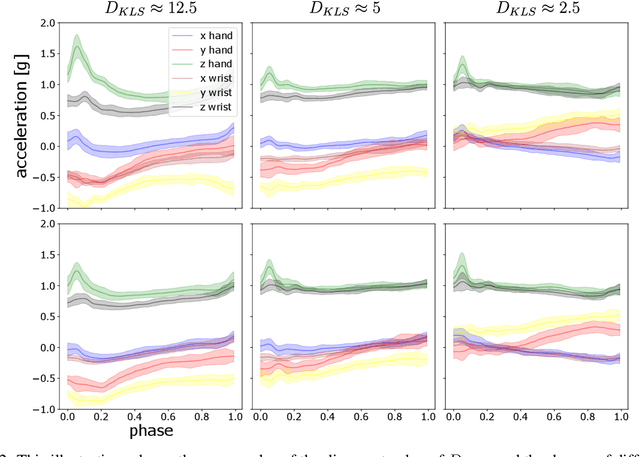
In medical tasks such as human motion analysis, computer-aided auxiliary systems have become preferred choice for human experts for its high efficiency. However, conventional approaches are typically based on user-defined features such as movement onset times, peak velocities, motion vectors or frequency domain analyses. Such approaches entail careful data post-processing or specific domain knowledge to achieve a meaningful feature extraction. Besides, they are prone to noise and the manual-defined features could hardly be re-used for other analyses. In this paper, we proposed probabilistic movement primitives (ProMPs), a widely-used approach in robot skill learning, to model human motions. The benefit of ProMPs is that the features are directly learned from the data and ProMPs can capture important features describing the trajectory shape, which can easily be extended to other tasks. Distinct from previous research, where classification tasks are mostly investigated, we applied ProMPs together with a variant of Kullback-Leibler (KL) divergence to quantify the effect of different transcranial current stimulation methods on human motions. We presented an initial result with 10 participants. The results validate ProMPs as a robust and effective feature extractor for human motions.
Parameter Optimization for Loop Closure Detection in Closed Environments
Nov 12, 2020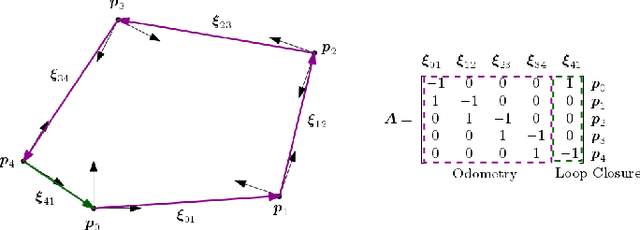
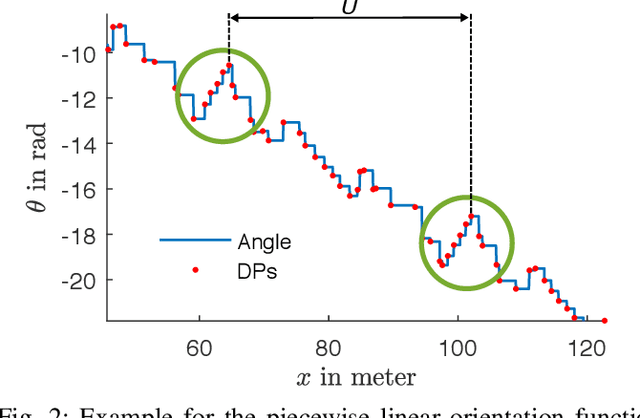
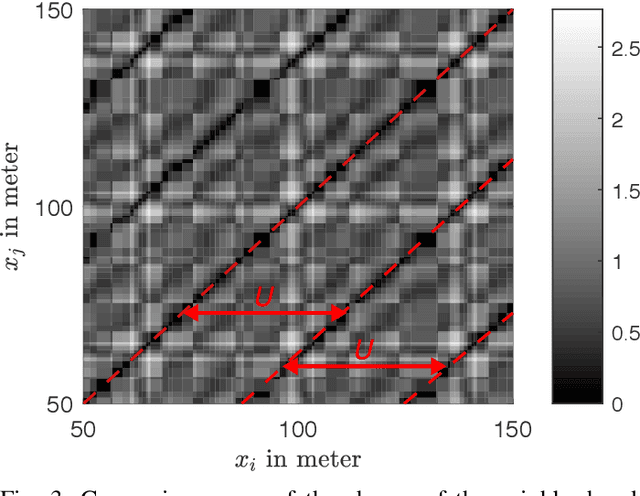
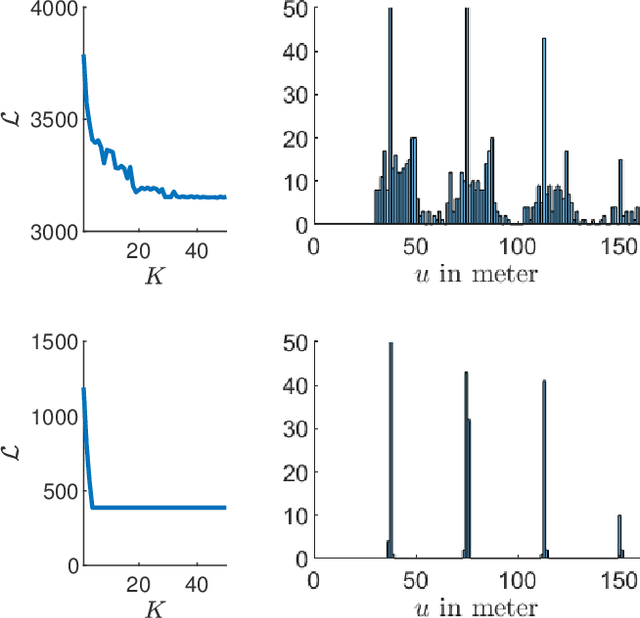
Tuning parameters is crucial for the performance of localization and mapping algorithms. In general, the tuning of the parameters requires expert knowledge and is sensitive to information about the structure of the environment. In order to design truly autonomous systems the robot has to learn the parameters automatically. Therefore, we propose a parameter optimization approach for loop closure detection in closed environments which requires neither any prior information, e.g. robot model parameters, nor expert knowledge. It relies on several path traversals along the boundary line of the closed environment. We demonstrate the performance of our method in challenging real world scenarios with limited sensing capabilities. These scenarios are exemplary for a wide range of practical applications including lawn mowers and household robots.