 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParameter Optimization for Loop Closure Detection in Closed Environments
Nov 12, 2020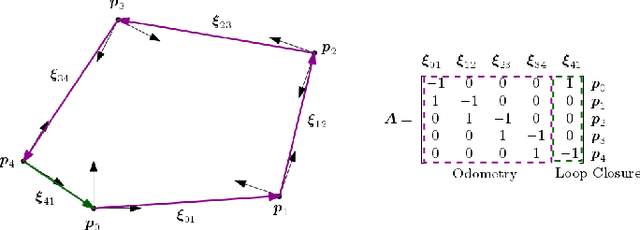
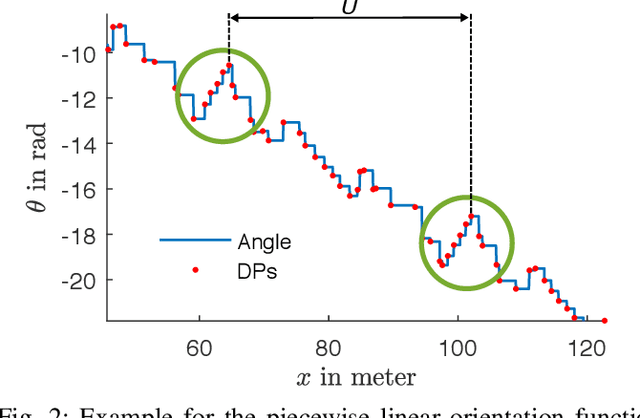
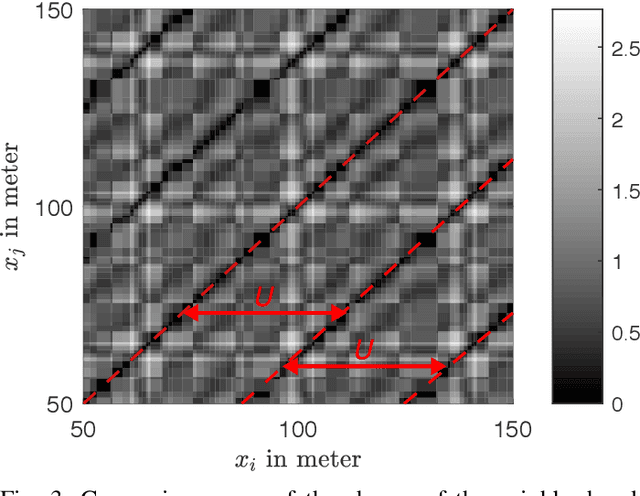
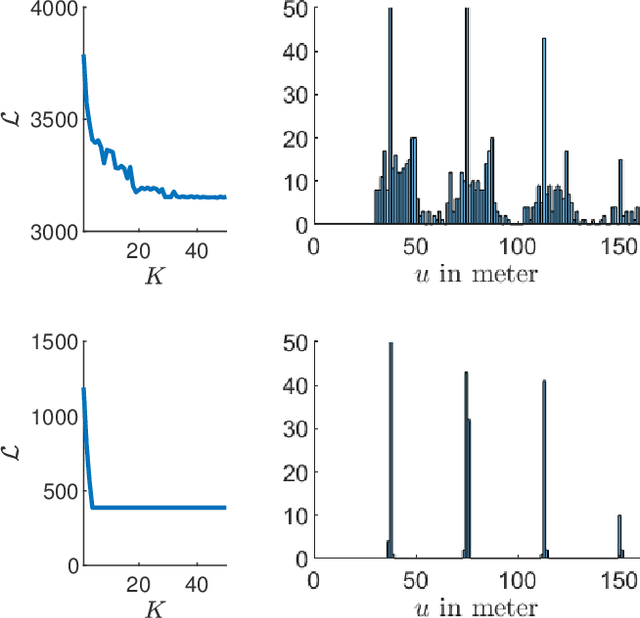
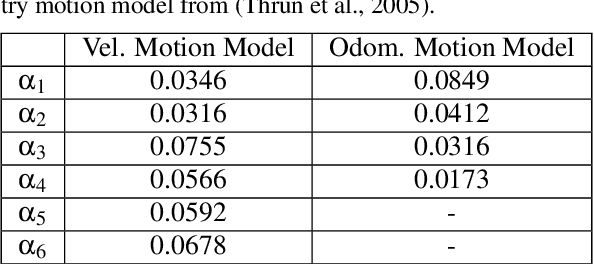
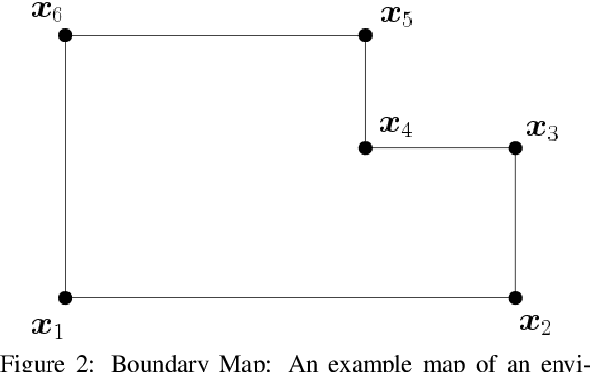
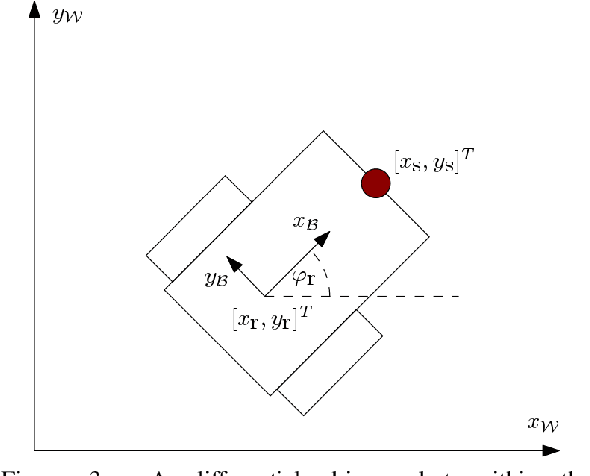
Tuning parameters is crucial for the performance of localization and mapping algorithms. In general, the tuning of the parameters requires expert knowledge and is sensitive to information about the structure of the environment. In order to design truly autonomous systems the robot has to learn the parameters automatically. Therefore, we propose a parameter optimization approach for loop closure detection in closed environments which requires neither any prior information, e.g. robot model parameters, nor expert knowledge. It relies on several path traversals along the boundary line of the closed environment. We demonstrate the performance of our method in challenging real world scenarios with limited sensing capabilities. These scenarios are exemplary for a wide range of practical applications including lawn mowers and household robots.
Cataglyphis ant navigation strategies solve the global localization problem in robots with binary sensors
Aug 13, 2019
Low cost robots, such as vacuum cleaners or lawn mowers, employ simplistic and often random navigation policies. Although a large number of sophisticated localization and planning approaches exist, they require additional sensors like LIDAR sensors, cameras or time of flight sensors. In this work, we propose a global localization method biologically inspired by simple insects, such as the ant Cataglyphis that is able to return from distant locations to its nest in the desert without any or with limited perceptual cues. Like in Cataglyphis, the underlying idea of our localization approach is to first compute a pose estimate from pro-prioceptual sensors only, using land navigation, and thereafter refine the estimate through a systematic search in a particle filter that integrates the rare visual feedback. In simulation experiments in multiple environments, we demonstrated that this bioinspired principle can be used to compute accurate pose estimates from binary visual cues only. Such intelligent localization strategies can improve the performance of any robot with limited sensing capabilities such as household robots or toys.
* Accepted to BIOSIGNALS 2019
Loop Closure Detection in Closed Environments
Aug 13, 2019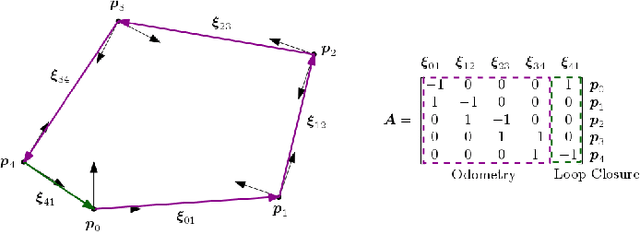
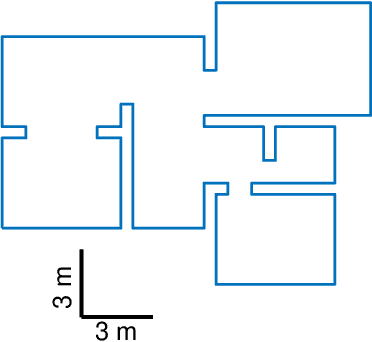
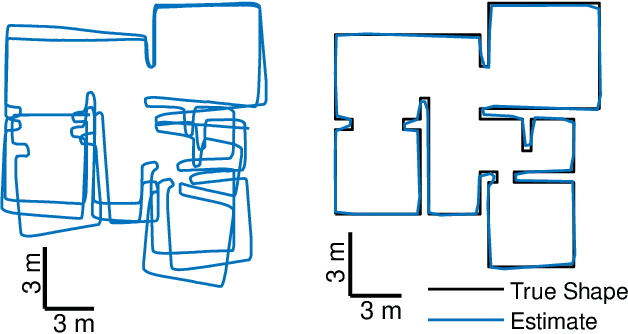
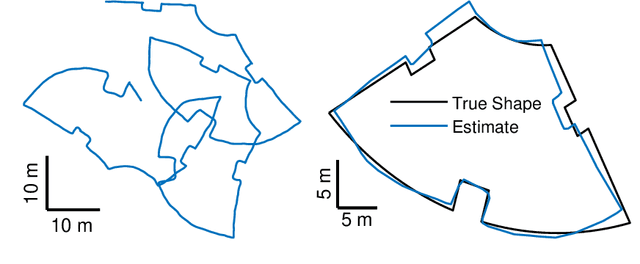
Low cost robots, such as vacuum cleaners or lawn mowers employ simplistic and often random navigation policies. Although a large number of sophisticated mapping and planning approaches exist, they require additional sensors like LIDAR sensors, cameras or time of flight sensors. In this work, we propose a loop closure detection method based only on odometry data which can be generated using low-range or binary signal sensors together with simple wall following techniques. We show how to include the detected loop closing constraints into a pose graph formulation such that standard pose graph optimization techniques can be used for map estimation. We evaluate our map estimate and loop closure approach using both, simulation and a real lawn mower in complex and realistic environments. Our results demonstrate that our approach generates accurate map estimates on the basis of odometry data only. We further show that our assumption about the discriminative nature of neighboring poses in the pose graph is solid, even under large odometry noise. These improved map estimates provide the basis for smart navigation policies in low cost robots and extends their abilities to goal-directed behavior like pick and place or complete coverage path planning in realistic environments.