 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSitting, Standing and Walking Control of the Series-Parallel Hybrid Recupera-Reha Exoskeleton
Oct 08, 2024



This paper presents advancements in the functionalities of the Recupera-Reha lower extremity exoskeleton robot. The exoskeleton features a series-parallel hybrid design characterized by multiple kinematic loops resulting in 148 degrees of freedom in its spanning tree and 102 independent loop closure constraints, which poses significant challenges for modeling and control. To address these challenges, we applied an optimal control approach to generate feasible trajectories such as sitting, standing, and static walking, and tested these trajectories on the exoskeleton robot. Our method efficiently solves the optimal control problem using a serial abstraction of the model to generate trajectories. It then utilizes the full series-parallel hybrid model, which takes all the kinematic loop constraints into account to generate the final actuator commands. The experimental results demonstrate the effectiveness of our approach in generating the desired motions for the exoskeleton.
Continuous ErrP detections during multimodal human-robot interaction
Jul 25, 2022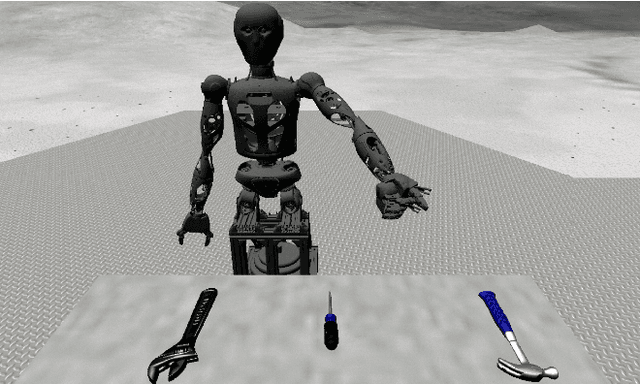
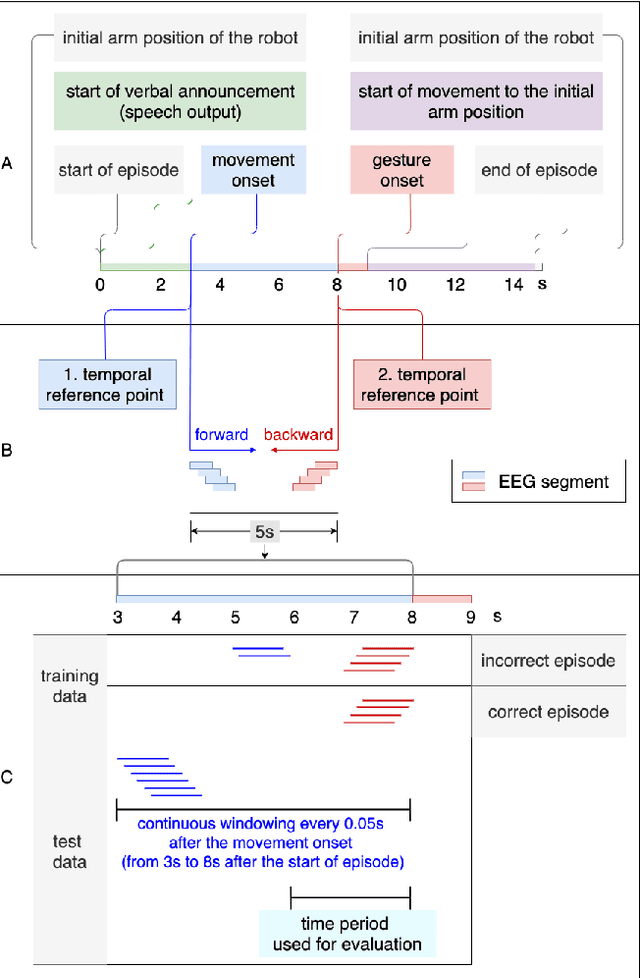
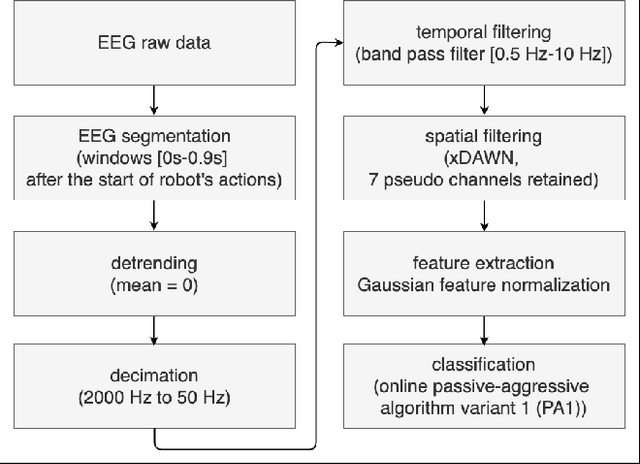
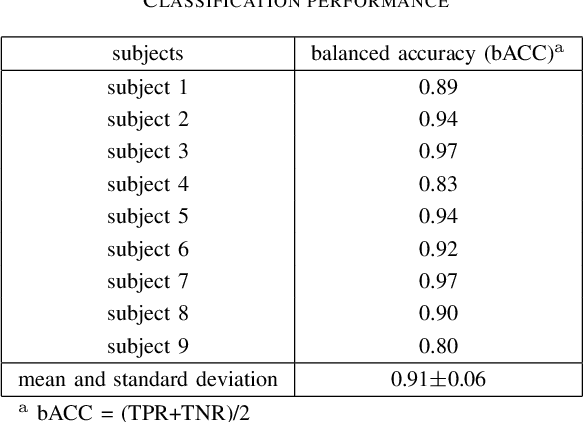
Human-in-the-loop approaches are of great importance for robot applications. In the presented study, we implemented a multimodal human-robot interaction (HRI) scenario, in which a simulated robot communicates with its human partner through speech and gestures. The robot announces its intention verbally and selects the appropriate action using pointing gestures. The human partner, in turn, evaluates whether the robot's verbal announcement (intention) matches the action (pointing gesture) chosen by the robot. For cases where the verbal announcement of the robot does not match the corresponding action choice of the robot, we expect error-related potentials (ErrPs) in the human electroencephalogram (EEG). These intrinsic evaluations of robot actions by humans, evident in the EEG, were recorded in real time, continuously segmented online and classified asynchronously. For feature selection, we propose an approach that allows the combinations of forward and backward sliding windows to train a classifier. We achieved an average classification performance of 91% across 9 subjects. As expected, we also observed a relatively high variability between the subjects. In the future, the proposed feature selection approach will be extended to allow for customization of feature selection. To this end, the best combinations of forward and backward sliding windows will be automatically selected to account for inter-subject variability in classification performance. In addition, we plan to use the intrinsic human error evaluation evident in the error case by the ErrP in interactive reinforcement learning to improve multimodal human-robot interaction.