 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEEG classifier cross-task transfer to avoid training sessions in robot-assisted rehabilitation
Feb 26, 2024Background: For an individualized support of patients during rehabilitation, learning of individual machine learning models from the human electroencephalogram (EEG) is required. Our approach allows labeled training data to be recorded without the need for a specific training session. For this, the planned exoskeleton-assisted rehabilitation enables bilateral mirror therapy, in which movement intentions can be inferred from the activity of the unaffected arm. During this therapy, labeled EEG data can be collected to enable movement predictions of only the affected arm of a patient. Methods: A study was conducted with 8 healthy subjects and the performance of the classifier transfer approach was evaluated. Each subject performed 3 runs of 40 self-intended unilateral and bilateral reaching movements toward a target while EEG data was recorded from 64 channels. A support vector machine (SVM) classifier was trained under both movement conditions to make predictions for the same type of movement. Furthermore, the classifier was evaluated to predict unilateral movements by only beeing trained on the data of the bilateral movement condition. Results: The results show that the performance of the classifier trained on selected EEG channels evoked by bilateral movement intentions is not significantly reduced compared to a classifier trained directly on EEG data including unilateral movement intentions. Moreover, the results show that our approach also works with only 8 or even 4 channels. Conclusion: It was shown that the proposed classifier transfer approach enables motion prediction without explicit collection of training data. Since the approach can be applied even with a small number of EEG channels, this speaks for the feasibility of the approach in real therapy sessions with patients and motivates further investigations with stroke patients.
EEG and EMG dataset for the detection of errors introduced by an active orthosis device
May 25, 2023



This paper presents a dataset containing recordings of the electroencephalogram (EEG) and the electromyogram (EMG) from eight subjects who were assisted in moving their right arm by an active orthosis device. The supported movements were elbow joint movements, i.e., flexion and extension of the right arm. While the orthosis was actively moving the subject's arm, some errors were deliberately introduced for a short duration of time. During this time, the orthosis moved in the opposite direction. In this paper, we explain the experimental setup and present some behavioral analyses across all subjects. Additionally, we present an average event-related potential analysis for one subject to offer insights into the data quality and the EEG activity caused by the error introduction. The dataset described herein is openly accessible. The aim of this study was to provide a dataset to the research community, particularly for the development of new methods in the asynchronous detection of erroneous events from the EEG. We are especially interested in the tactile and haptic-mediated recognition of errors, which has not yet been sufficiently investigated in the literature. We hope that the detailed description of the orthosis and the experiment will enable its reproduction and facilitate a systematic investigation of the influencing factors in the detection of erroneous behavior of assistive systems by a large community.
Classifier Transfer with Data Selection Strategies for Online Support Vector Machine Classification with Class Imbalance
Aug 10, 2022Objective: Classifier transfers usually come with dataset shifts. To overcome them, online strategies have to be applied. For practical applications, limitations in the computational resources for the adaptation of batch learning algorithms, like the SVM, have to be considered. Approach: We review and compare several strategies for online learning with SVMs. We focus on data selection strategies which limit the size of the stored training data [...] Main Results: For different data shifts, different criteria are appropriate. For the synthetic data, adding all samples to the pool of considered samples performs often significantly worse than other criteria. Especially, adding only misclassified samples performed astoundingly well. Here, balancing criteria were very important when the other criteria were not well chosen. For the transfer setups, the results show that the best strategy depends on the intensity of the drift during the transfer. Adding all and removing the oldest samples results in the best performance, whereas for smaller drifts, it can be sufficient to only add potential new support vectors of the SVM which reduces processing resources. Significance: For BCIs based on EEG models, trained on data from a calibration session, a previous recording session, or even from a recording session with one or several other subjects, are used. This transfer of the learned model usually decreases the performance and can therefore benefit from online learning which adapts the classifier like the established SVM. We show that by using the right combination of data selection criteria, it is possible to adapt the classifier and largely increase the performance. Furthermore, in some cases it is possible to speed up the processing and save computational by updating with a subset of special samples and keeping a small subset of samples for training the classifier.
Continuous ErrP detections during multimodal human-robot interaction
Jul 25, 2022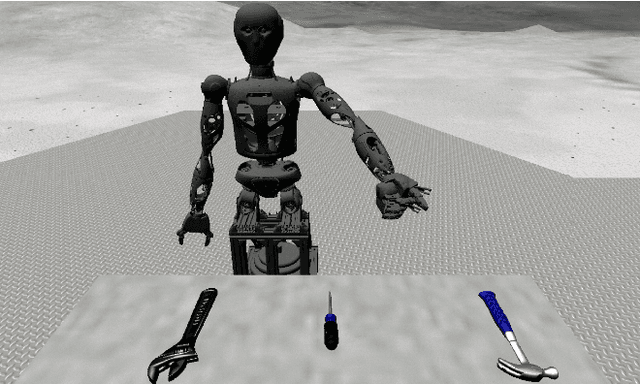
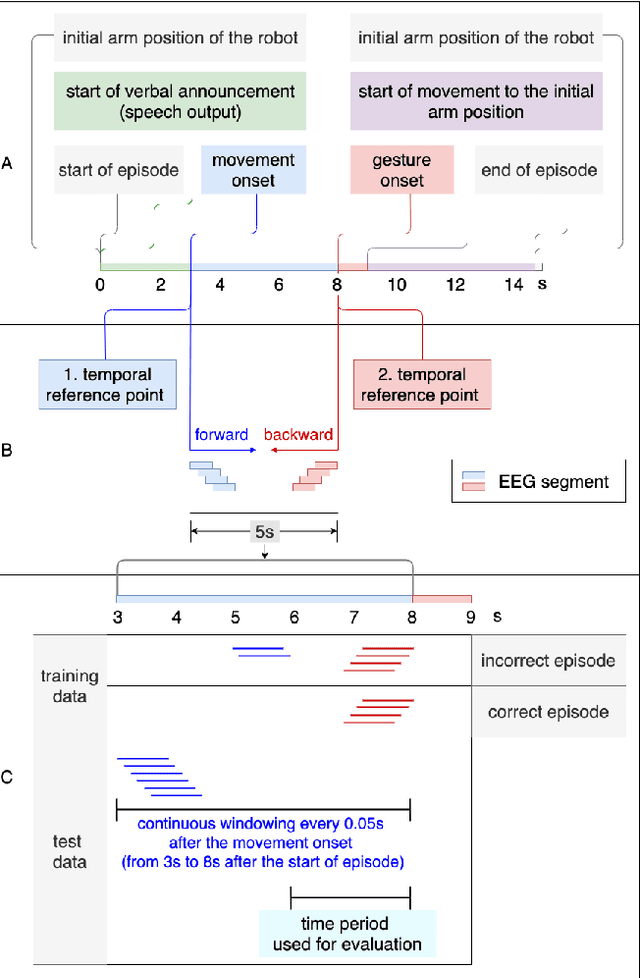
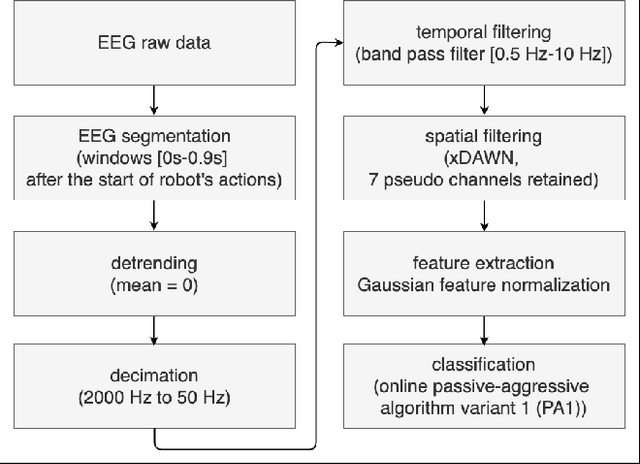
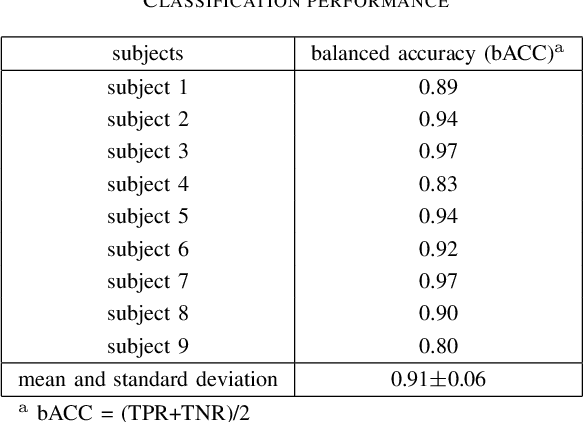
Human-in-the-loop approaches are of great importance for robot applications. In the presented study, we implemented a multimodal human-robot interaction (HRI) scenario, in which a simulated robot communicates with its human partner through speech and gestures. The robot announces its intention verbally and selects the appropriate action using pointing gestures. The human partner, in turn, evaluates whether the robot's verbal announcement (intention) matches the action (pointing gesture) chosen by the robot. For cases where the verbal announcement of the robot does not match the corresponding action choice of the robot, we expect error-related potentials (ErrPs) in the human electroencephalogram (EEG). These intrinsic evaluations of robot actions by humans, evident in the EEG, were recorded in real time, continuously segmented online and classified asynchronously. For feature selection, we propose an approach that allows the combinations of forward and backward sliding windows to train a classifier. We achieved an average classification performance of 91% across 9 subjects. As expected, we also observed a relatively high variability between the subjects. In the future, the proposed feature selection approach will be extended to allow for customization of feature selection. To this end, the best combinations of forward and backward sliding windows will be automatically selected to account for inter-subject variability in classification performance. In addition, we plan to use the intrinsic human error evaluation evident in the error case by the ErrP in interactive reinforcement learning to improve multimodal human-robot interaction.
Data Augmentation for Brain-Computer Interfaces: Analysis on Event-Related Potentials Data
Jan 09, 2018



On image data, data augmentation is becoming less relevant due to the large amount of available training data and regularization techniques. Common approaches are moving windows (cropping), scaling, affine distortions, random noise, and elastic deformations. For electroencephalographic data, the lack of sufficient training data is still a major issue. We suggest and evaluate different approaches to generate augmented data using temporal and spatial/rotational distortions. Our results on the perception of rare stimuli (P300 data) and movement prediction (MRCP data) show that these approaches are feasible and can significantly increase the performance of signal processing chains for brain-computer interfaces by 1% to 6%.