 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Convergence Frontier: Integrating Machine Learning and High Performance Quantum Computing for Next-Generation Drug Discovery
Mar 19, 2026Integrating quantum mechanics into drug discovery marks a decisive shift from empirical trial-and-error toward quantitative precision. However, the prohibitive cost of ab initio molecular dynamics has historically forced a compromise between chemical accuracy and computational scalability. This paper identifies the convergence of High-Performance Computing (HPC), Machine Learning (ML), and Quantum Computing (QC) as the definitive solution to this bottleneck. While ML foundation models, such as FeNNix-Bio1, enable quantum-accurate simulations, they remain tethered to the inherent limits of classical data generation. We detail how High-Performance Quantum Computing (HPQC), utilizing hybrid QPU-GPU architectures, will serve as the ultimate accelerator for quantum chemistry data. By leveraging Hilbert space mapping, these systems can achieve true chemical accuracy while bypassing the heuristics of classical approximations. We show how this tripartite convergence optimizes the drug discovery pipeline, spanning from initial system preparation to ML-driven, high-fidelity simulations. Finally, we position quantum-enhanced sampling as the beyond GPU frontier for modeling reactive cellular systems and pioneering next-generation materials.
Enhancing Otological Surgery: Co-Designing a Parallel Robot with Surgeon Input
Aug 06, 2024This work presents the development of a parallel manipulator used for otological surgery from the perspective of co-design. Co-design refers to the simultaneous involvement of the end-users (surgeons), stakeholders (designers, ergonomic experts, manufacturers), and experts from the fields of optimization and mechanisms. The role of each member is discussed in detail and the interactions between the stakeholders are presented. Co-design facilitates a reduction in the parameter space considered during mechanism optimization, leading to a more efficient design process. Additionally, the co-design principles help avoid unforeseen errors and help in quicker adaptation of the proposed solution.
An efficient combined local and global search strategy for optimization of parallel kinematic mechanisms with joint limits and collision constraints
Feb 24, 2022


The optimization of parallel kinematic manipulators (PKM) involve several constraints that are difficult to formalize, thus making optimal synthesis problem highly challenging. The presence of passive joint limits as well as the singularities and self-collisions lead to a complicated relation between the input and output parameters. In this article, a novel optimization methodology is proposed by combining a local search, Nelder-Mead algorithm, with global search methodologies such as low discrepancy distribution for faster and more efficient exploration of the optimization space. The effect of the dimension of the optimization problem and the different constraints are discussed to highlight the complexities of closed-loop kinematic chain optimization. The work also presents the approaches used to consider constraints for passive joint boundaries as well as singularities to avoid internal collisions in such mechanisms. The proposed algorithm can also optimize the length of the prismatic actuators and the constraints can be added in modular fashion, allowing to understand the impact of given criteria on the final result. The application of the presented approach is used to optimize two PKMs of different degrees of freedom.
Geometric Atlas of the Middle Ear and Paranasal Sinuses for Robotic Applications
Oct 04, 2021

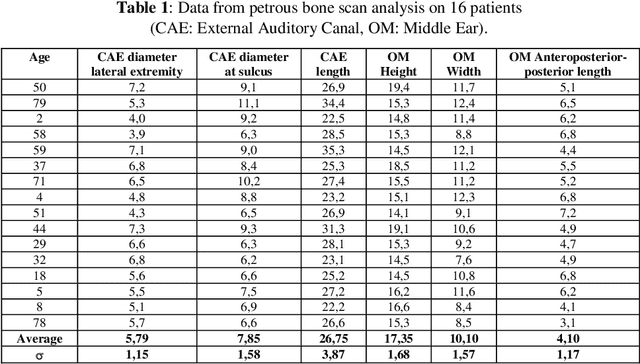
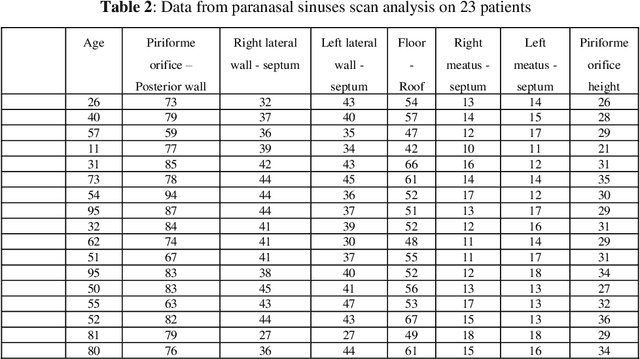
In otolaryngologic surgery, more and more robots are being studied to meet the clinical needs of operating rooms. However, to help design and optimize these robots, the workspace must be precisely defined taking into account patient variability. The aim of this work is to define a geometric atlas of the middle ear and paranasal sinuses for endoscopic robotic applications. Scans of several patients of different ages and sexes were used to determine the average size of these workspaces, which are linked by the similar use of endoscopes in surgery.
Literature Review on Endoscopic Robotic Systems in Ear and Sinus Surgery
Sep 28, 2021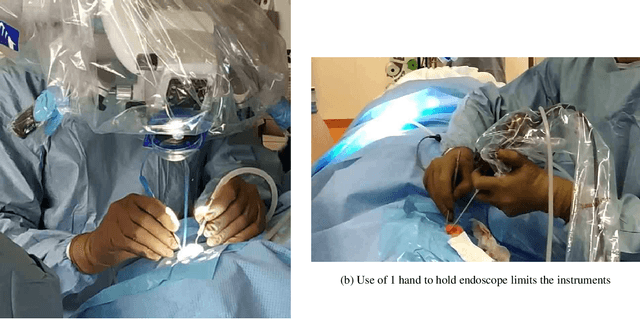



In otolaryngologic surgery, endoscopy is increasingly used to provide a better view of hard-to-reach areas and to promote minimally invasive surgery. However, the need to manipulate the endoscope limits the surgeon's ability to operate with only one instrument at a time. Currently, several robotic systems are being developed, demonstrating the value of robotic assistance in microsurgery. The aim of this literature review is to present and classify current robotic systems that are used for otological and endonasal applications. For these solutions, an analysis of the functionalities in relation to the surgeon's needs will be carried out in order to produce a set of specifications for the creation of new robots.
Weight Reparametrization for Budget-Aware Network Pruning
Jul 27, 2021



Pruning seeks to design lightweight architectures by removing redundant weights in overparameterized networks. Most of the existing techniques first remove structured sub-networks (filters, channels,...) and then fine-tune the resulting networks to maintain a high accuracy. However, removing a whole structure is a strong topological prior and recovering the accuracy, with fine-tuning, is highly cumbersome. In this paper, we introduce an "end-to-end" lightweight network design that achieves training and pruning simultaneously without fine-tuning. The design principle of our method relies on reparametrization that learns not only the weights but also the topological structure of the lightweight sub-network. This reparametrization acts as a prior (or regularizer) that defines pruning masks implicitly from the weights of the underlying network, without increasing the number of training parameters. Sparsity is induced with a budget loss that provides an accurate pruning. Extensive experiments conducted on the CIFAR10 and the TinyImageNet datasets, using standard architectures (namely Conv4, VGG19 and ResNet18), show compelling results without fine-tuning.
A new RCM mechanism for an ear and facial surgical application
May 12, 2020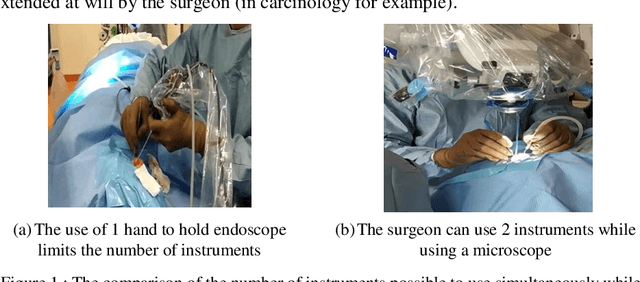

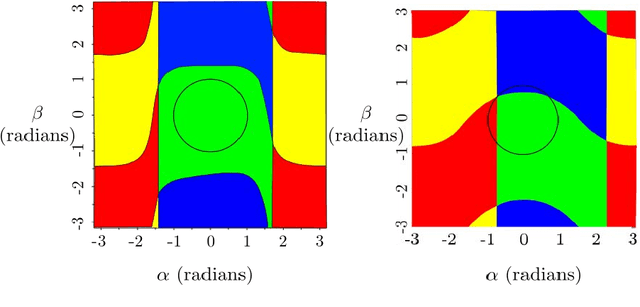
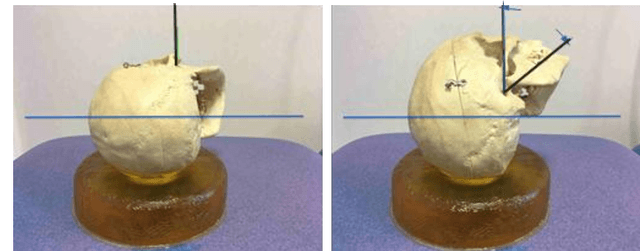
Since the insertion area in the middle ear or in the sinus cavity is very narrow, the mobility of the endoscope is reduced to a rotation around a virtual point and a translation for the insertion of the camera. This article first presents the anatomy of these regions obtained from 3D scanning and then a mechanism based on the architecture of the agile eye coupled to a double parallelogram to create an RCM. This mechanism coupled with a positioning mechanism is used to handle an endoscope. This tool is used in parallel to the surgeon to allow him to have better rendering of the medium ear than the use of Binocular scope. The mechanism offers a wide working space without singularity whose borders are fixed by joint limits. This feature allows ergonomic positioning of the patient's head on the bed as well as for the surgeon and allows other applications such as sinus surgery.
DVOLVER: Efficient Pareto-Optimal Neural Network Architecture Search
Feb 05, 2019



Automatic search of neural network architectures is a standing research topic. In addition to the fact that it presents a faster alternative to hand-designed architectures, it can improve their efficiency and for instance generate Convolutional Neural Networks (CNN) adapted for mobile devices. In this paper, we present a multi-objective neural architecture search method to find a family of CNN models with the best accuracy and computational resources tradeoffs, in a search space inspired by the state-of-the-art findings in neural search. Our work, called Dvolver, evolves a population of architectures and iteratively improves an approximation of the optimal Pareto front. Applying Dvolver on the model accuracy and on the number of floating points operations as objective functions, we are able to find, in only 2.5 days, a set of competitive mobile models on ImageNet. Amongst these models one architecture has the same Top-1 accuracy on ImageNet as NASNet-A mobile with 8% less floating point operations and another one has a Top-1 accuracy of 75.28% on ImageNet exceeding by 0.28% the best MobileNetV2 model for the same computational resources.