 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA new RCM mechanism for an ear and facial surgical application
Paper and Code
May 12, 2020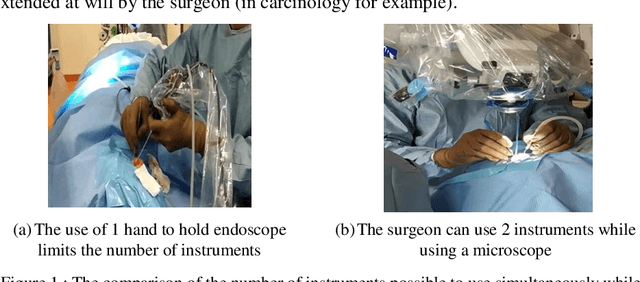
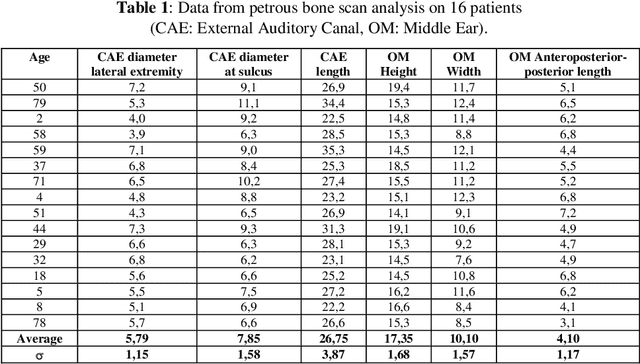

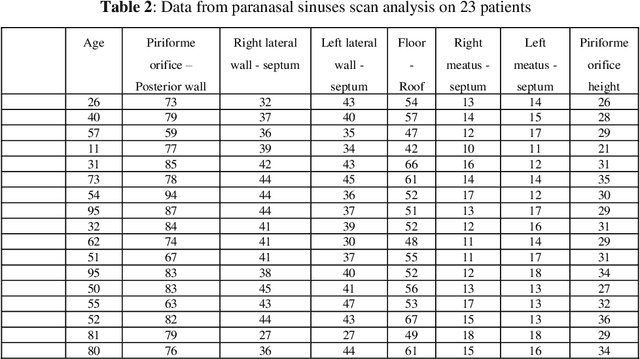
Since the insertion area in the middle ear or in the sinus cavity is very narrow, the mobility of the endoscope is reduced to a rotation around a virtual point and a translation for the insertion of the camera. This article first presents the anatomy of these regions obtained from 3D scanning and then a mechanism based on the architecture of the agile eye coupled to a double parallelogram to create an RCM. This mechanism coupled with a positioning mechanism is used to handle an endoscope. This tool is used in parallel to the surgeon to allow him to have better rendering of the medium ear than the use of Binocular scope. The mechanism offers a wide working space without singularity whose borders are fixed by joint limits. This feature allows ergonomic positioning of the patient's head on the bed as well as for the surgeon and allows other applications such as sinus surgery.