 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeciding cuspidality of manipulators through computer algebra and algorithms in real algebraic geometry
Mar 09, 2022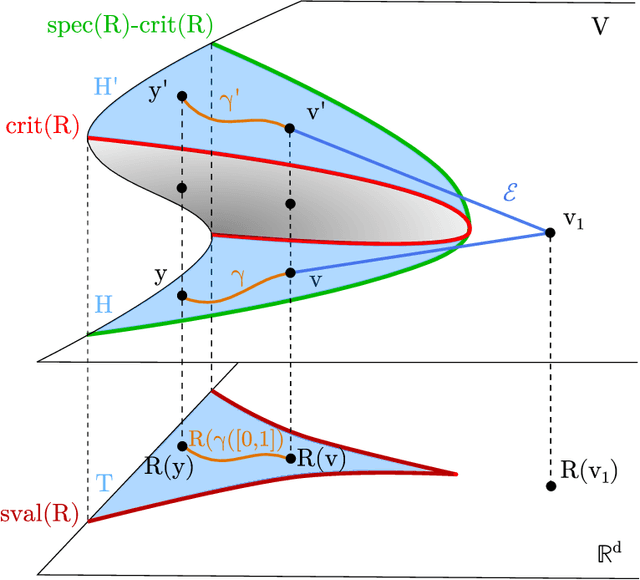
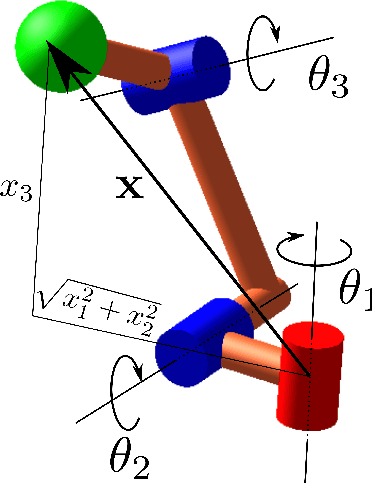
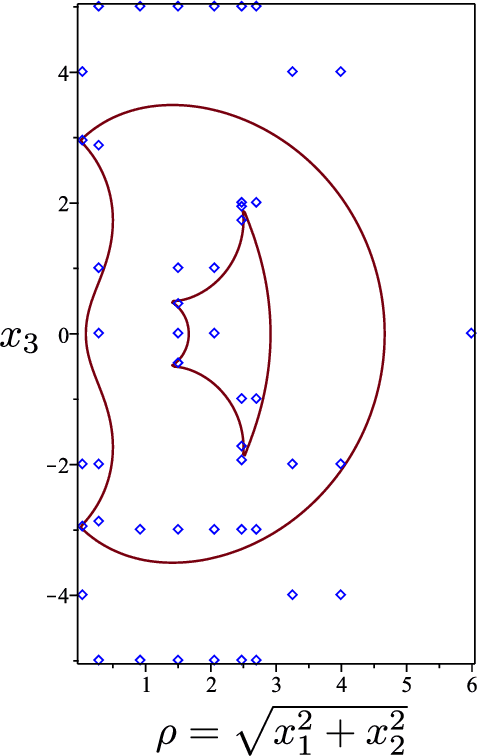
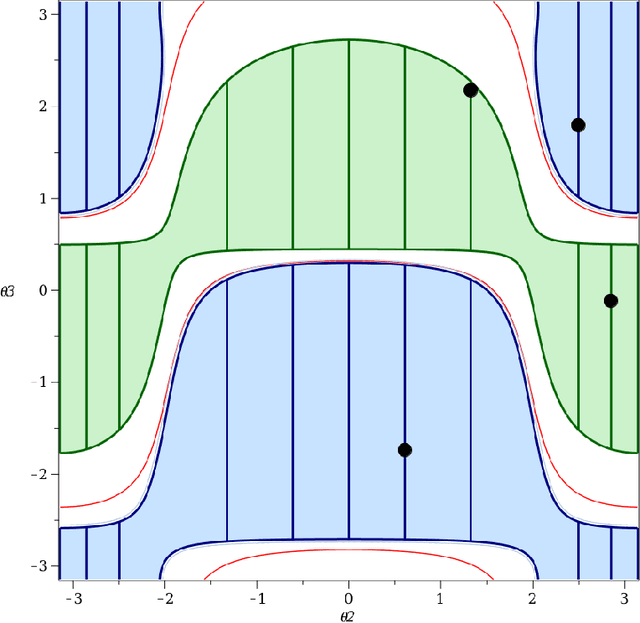
Cuspidal robots are robots with at least two inverse kinematic solutions that can be connected by a singularity-free path. Deciding the cuspidality of a generic 3R robots has been studied in the past, but extending the study to six-degree-of-freedom robots can be a challenging problem. Many robots can be modeled as a polynomial map together with a real algebraic set so that the notion of cuspidality can be extended to these data.In this paper we design an algorithm that, on input a polynomial map in $n$ indeterminates, and $s$ polynomials in the same indeterminates describing a real algebraic set of dimension $d$, decides the cuspidality of the restriction of the map to the real algebraic set under consideration. Moreover, if $D$ and $\tau$ are respectively the maximum degree and a bound on the bit size of the coefficients of the input polynomials, this algorithm runs in time log-linear in $\tau$ and polynomial in $((s+d)nD)^{O(n^2)}$.It relies on many high-level algorithms in computer algebra which use advanced methods on real algebraic sets and critical loci of polynomial maps. As far as we know, this is the first algorithm that tackles the cuspidality problem from a general point of view.
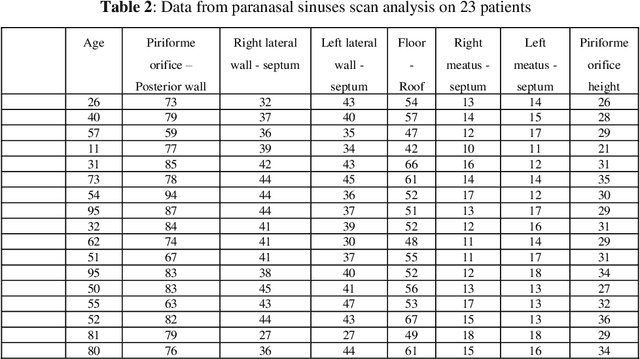
Geometric Atlas of the Middle Ear and Paranasal Sinuses for Robotic Applications
Oct 04, 2021

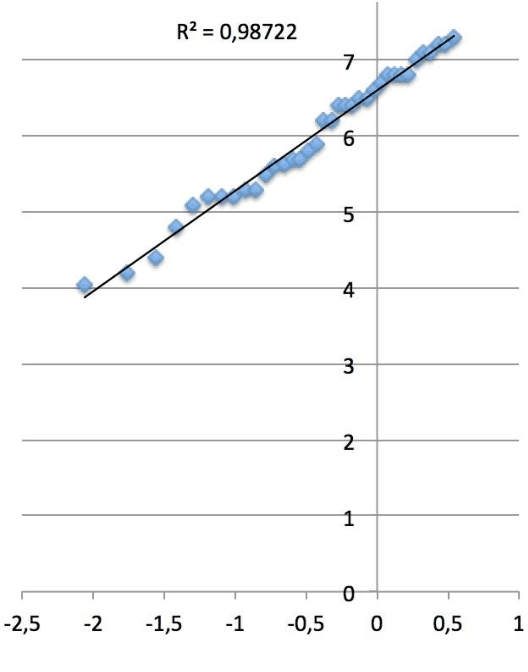
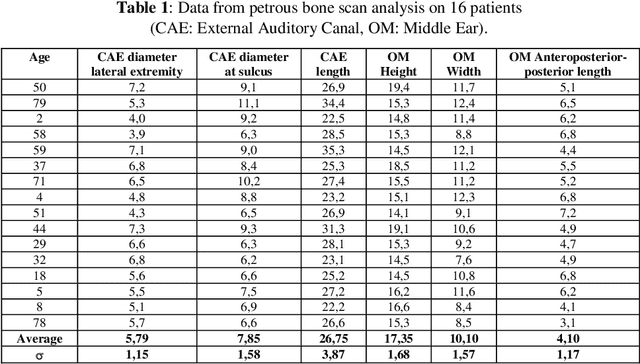
In otolaryngologic surgery, more and more robots are being studied to meet the clinical needs of operating rooms. However, to help design and optimize these robots, the workspace must be precisely defined taking into account patient variability. The aim of this work is to define a geometric atlas of the middle ear and paranasal sinuses for endoscopic robotic applications. Scans of several patients of different ages and sexes were used to determine the average size of these workspaces, which are linked by the similar use of endoscopes in surgery.
A new RCM mechanism for an ear and facial surgical application
May 12, 2020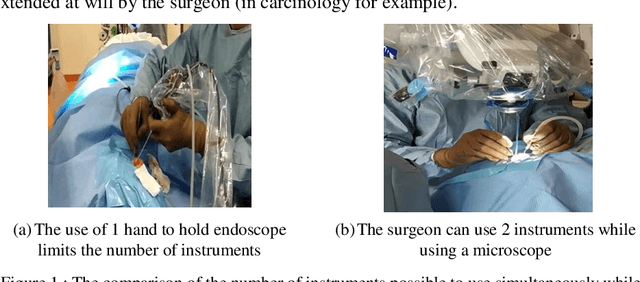

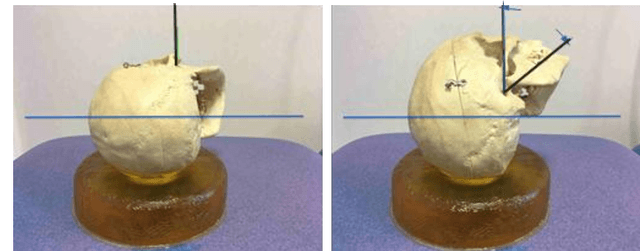
Since the insertion area in the middle ear or in the sinus cavity is very narrow, the mobility of the endoscope is reduced to a rotation around a virtual point and a translation for the insertion of the camera. This article first presents the anatomy of these regions obtained from 3D scanning and then a mechanism based on the architecture of the agile eye coupled to a double parallelogram to create an RCM. This mechanism coupled with a positioning mechanism is used to handle an endoscope. This tool is used in parallel to the surgeon to allow him to have better rendering of the medium ear than the use of Binocular scope. The mechanism offers a wide working space without singularity whose borders are fixed by joint limits. This feature allows ergonomic positioning of the patient's head on the bed as well as for the surgeon and allows other applications such as sinus surgery.