 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Predictive Parkour Control of a Monoped Hopper in Dynamically Changing Environments
Aug 26, 2024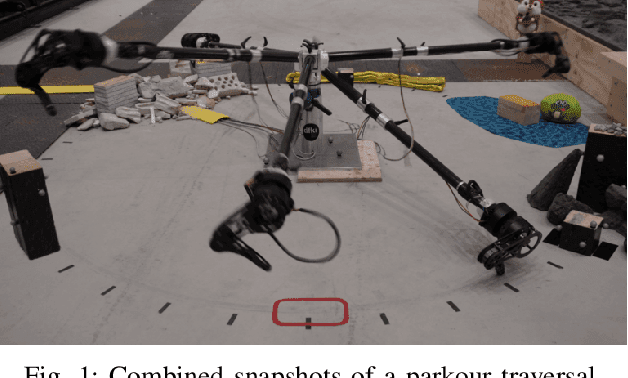
A great advantage of legged robots is their ability to operate on particularly difficult and obstructed terrain, which demands dynamic, robust, and precise movements. The study of obstacle courses provides invaluable insights into the challenges legged robots face, offering a controlled environment to assess and enhance their capabilities. Traversing it with a one-legged hopper introduces intricate challenges, such as planning over contacts and dealing with flight phases, which necessitates a sophisticated controller. A novel model predictive parkour controller is introduced, that finds an optimal path through a real-time changing obstacle course with mixed integer motion planning. The execution of this optimized path is then achieved through a state machine employing a PD control scheme with feedforward torques, ensuring robust and accurate performance.