 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Tactile Feedback Approach to Path Recovery after High-Speed Impacts for Collision-Resilient Drones
Oct 18, 2024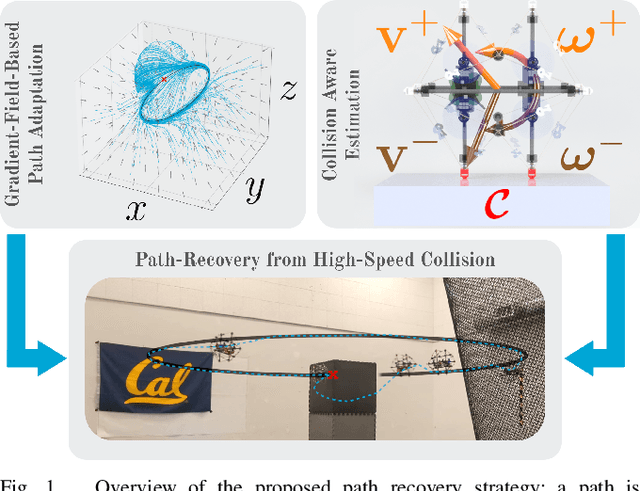

Aerial robots are a well-established solution for exploration, monitoring, and inspection, thanks to their superior maneuverability and agility. However, in many environments of interest, they risk crashing and sustaining damage following collisions. Traditional methods focus on avoiding obstacles entirely to prevent damage, but these approaches can be limiting, particularly in complex environments where collisions may be unavoidable, or on weight and compute-constrained platforms. This paper presents a novel approach to enhance the robustness and autonomy of drones in such scenarios by developing a path recovery and adjustment method for a high-speed collision-resistant drone equipped with binary contact sensors. The proposed system employs an estimator that explicitly models collisions, using pre-collision velocities and rates to predict post-collision dynamics, thereby improving the drone's state estimation accuracy. Additionally, we introduce a vector-field-based path representation which guarantees convergence to the path. Post-collision, the contact point is incorporated into the vector field as a repulsive potential, enabling the drone to avoid obstacles while naturally converging to the original path. The effectiveness of this method is validated through Monte Carlo simulations and demonstrated on a physical prototype, showing successful path following and adjustment through collisions as well as recovery from collisions at speeds up to 3.7 m / s.
Dynamics of spherical telescopic linear driven rotation robots
Apr 14, 2024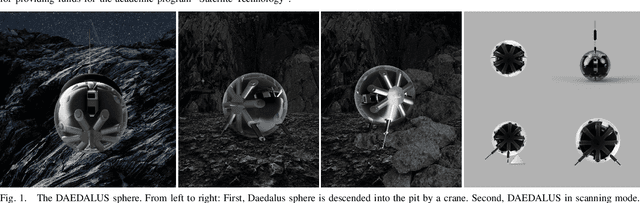
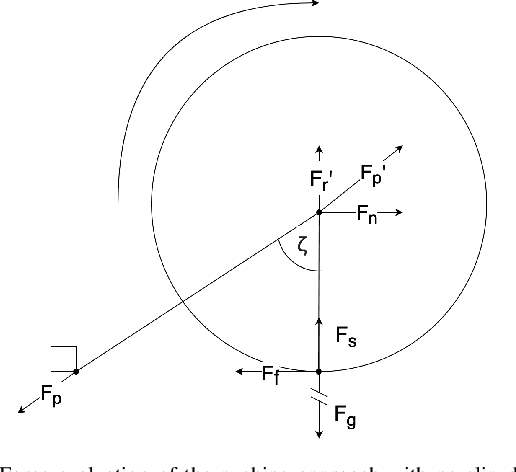
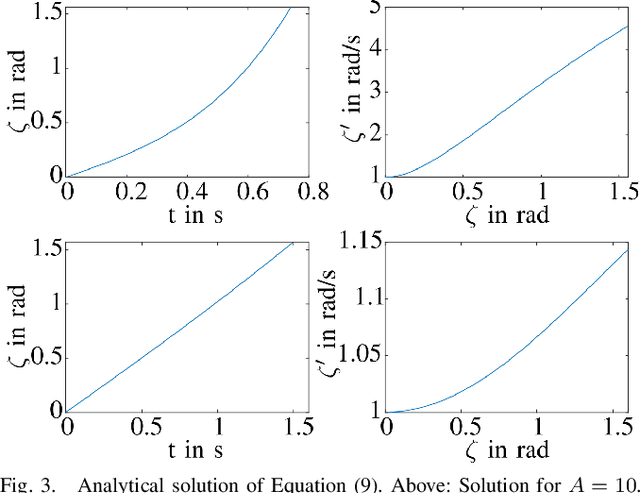
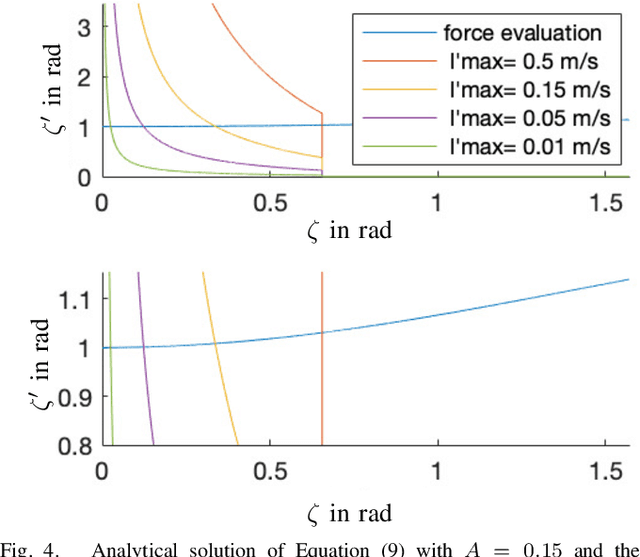
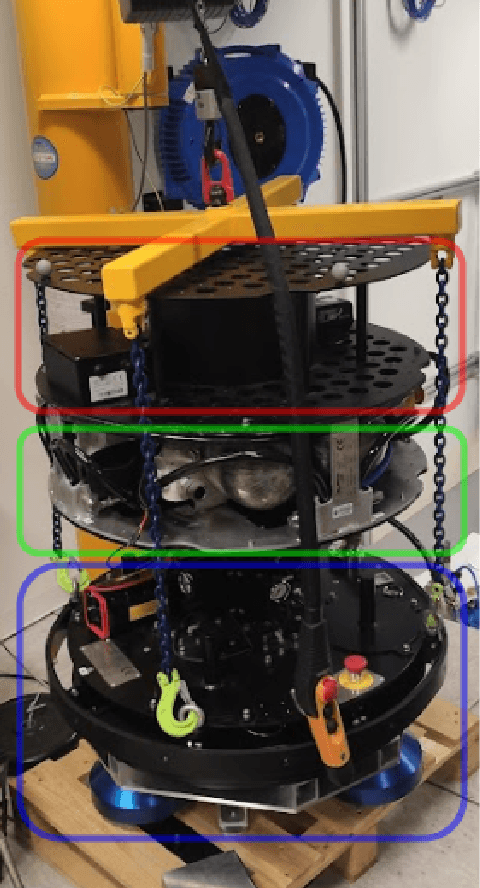
Lunar caves are promising features for long-term and permanent human presence on the moon. However, given their inaccessibility to imaging from survey satellites, the concrete environment within the underground cavities is not well known. Thus, to further the efforts of human presence on the moon, these caves are to be explored by robotic systems. However, a set of environmental factors make this exploration particularly challenging. Among those are the very fine lunar dust that damages exposed sensors and actuators and the unknown composition of the surface and obstacles within the cavity. One robotic system that is particularly fit to meet these challenges is that of a spherical robot, as the exterior shell completely separates the sensors and actuators from the hazardous environment. This work introduces the mathematical description in the form of a dynamic model of a novel locomotion approach for this form factor that adds additional functionality. A set of telescopic linearly extending rods moves the robot using a combination of pushing away from the ground and leveraging the gravitational torque. The approach allows the system to locomote, overcome objects by hoisting its center of gravity on top, and transform into a terrestrial laser scanner by using the rods as a tripod.
Trajectory Optimization and Following for a Three Degrees of Freedom Overactuated Floating Platform
Jul 21, 2022
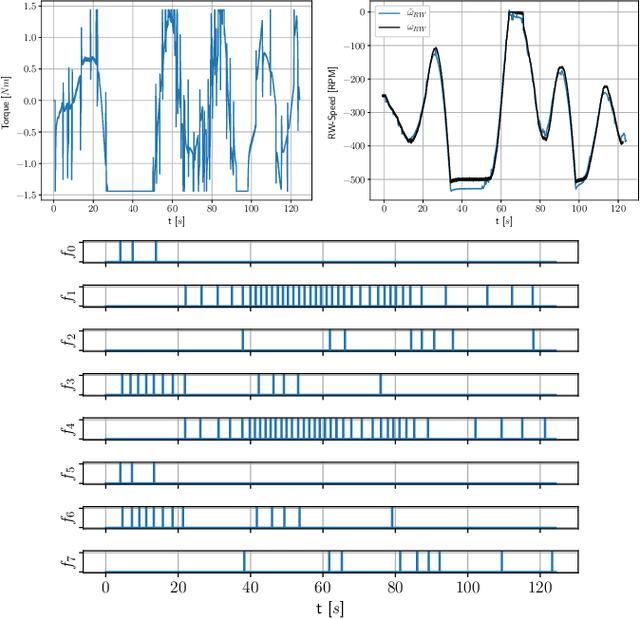
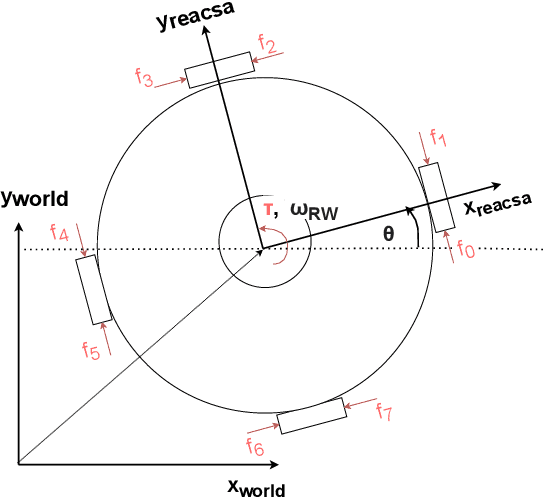
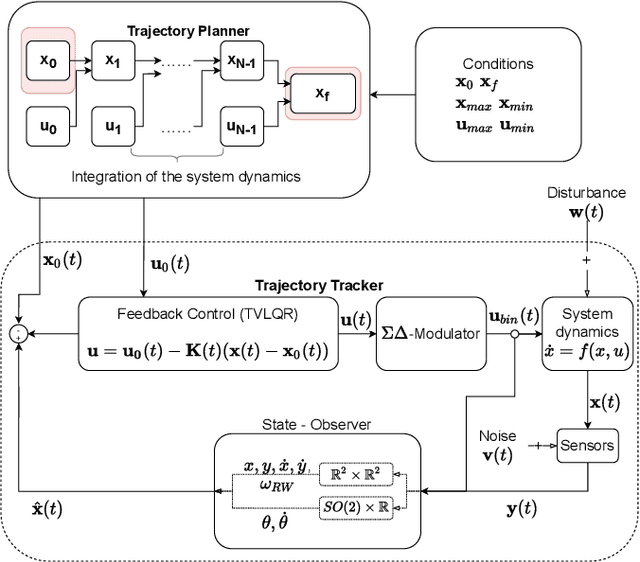
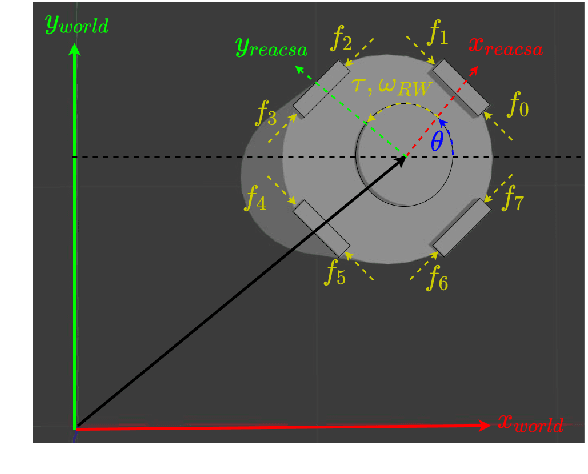
Space robotics applications, such as Active Space Debris Removal (ASDR), require representative testing before launch. A commonly used approach to emulate the microgravity environment in space is air-bearing based platforms on flat-floors, such as the European Space Agency's Orbital Robotics and GNC Lab (ORGL). This work proposes a control architecture for a floating platform at the ORGL, equipped with eight solenoid-valve-based thrusters and one reaction wheel. The control architecture consists of two main components: a trajectory planner that finds optimal trajectories connecting two states and a trajectory follower that follows any physically feasible trajectory. The controller is first evaluated within an introduced simulation, achieving a 100 % success rate at finding and following trajectories to the origin within a Monte-Carlo test. Individual trajectories are also successfully followed by the physical system. In this work, we showcase the ability of the controller to reject disturbances and follow a straight-line trajectory within tens of centimeters.
Finding and Following Optimal Trajectories for an Overactuated Floating Robotic Platform
Jun 08, 2022

The recent increase in yearly spacecraft launches and the high number of planned launches have raised questions about maintaining accessibility to space for all interested parties. A key to sustaining the future of space-flight is the ability to service malfunctioning - and actively remove dysfunctional spacecraft from orbit. Robotic platforms that autonomously perform these tasks are a topic of ongoing research and thus must undergo thorough testing before launch. For representative system-level testing, the European Space Agency (ESA) uses, among other things, the Orbital Robotics and GNC Lab (ORGL), a flat-floor facility where air-bearing based platforms exhibit free-floating behavior in three Degrees of Freedom (DoF). This work introduces a representative simulation of a free-floating platform in the testing environment and a software framework for controller development. Finally, this work proposes a controller within that framework for finding and following optimal trajectories between arbitrary states, which is evaluated in simulation and reality.