 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Tactile Feedback Approach to Path Recovery after High-Speed Impacts for Collision-Resilient Drones
Paper and Code
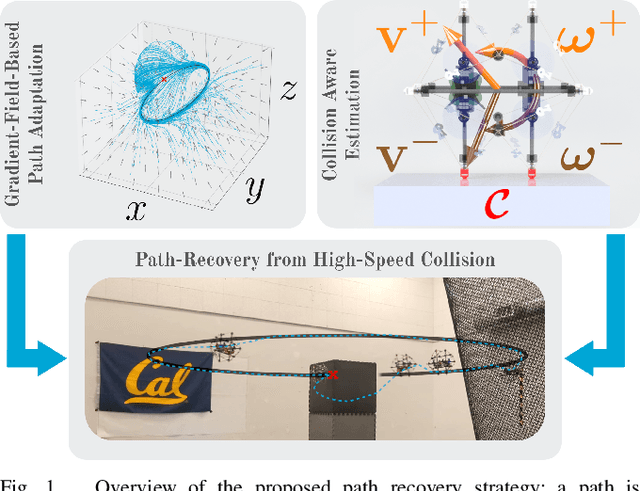

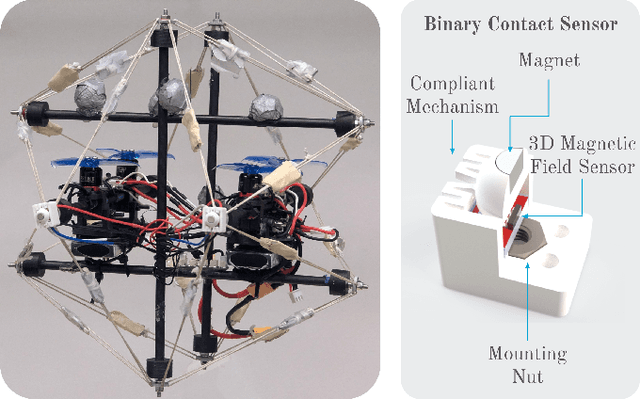
Aerial robots are a well-established solution for exploration, monitoring, and inspection, thanks to their superior maneuverability and agility. However, in many environments of interest, they risk crashing and sustaining damage following collisions. Traditional methods focus on avoiding obstacles entirely to prevent damage, but these approaches can be limiting, particularly in complex environments where collisions may be unavoidable, or on weight and compute-constrained platforms. This paper presents a novel approach to enhance the robustness and autonomy of drones in such scenarios by developing a path recovery and adjustment method for a high-speed collision-resistant drone equipped with binary contact sensors. The proposed system employs an estimator that explicitly models collisions, using pre-collision velocities and rates to predict post-collision dynamics, thereby improving the drone's state estimation accuracy. Additionally, we introduce a vector-field-based path representation which guarantees convergence to the path. Post-collision, the contact point is incorporated into the vector field as a repulsive potential, enabling the drone to avoid obstacles while naturally converging to the original path. The effectiveness of this method is validated through Monte Carlo simulations and demonstrated on a physical prototype, showing successful path following and adjustment through collisions as well as recovery from collisions at speeds up to 3.7 m / s.