 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOmnidirectional Dual-Arm Aerial Manipulator with Proprioceptive Contact Localization for Landing on Slanted Roofs
Feb 11, 2026Operating drones in urban environments often means they need to land on rooftops, which can have different geometries and surface irregularities. Accurately detecting roof inclination using conventional sensing methods, such as vision-based or acoustic techniques, can be unreliable, as measurement quality is strongly influenced by external factors including weather conditions and surface materials. To overcome these challenges, we propose a novel unmanned aerial manipulator morphology featuring a dual-arm aerial manipulator with an omnidirectional 3D workspace and extended reach. Building on this design, we develop a proprioceptive contact detection and contact localization strategy based on a momentum-based torque observer. This enables the UAM to infer the inclination of slanted surfaces blindly - through physical interaction - prior to touchdown. We validate the approach in flight experiments, demonstrating robust landings on surfaces with inclinations of up to 30.5 degrees and achieving an average surface inclination estimation error of 2.87 degrees over 9 experiments at different incline angles.
A Tactile Feedback Approach to Path Recovery after High-Speed Impacts for Collision-Resilient Drones
Oct 18, 2024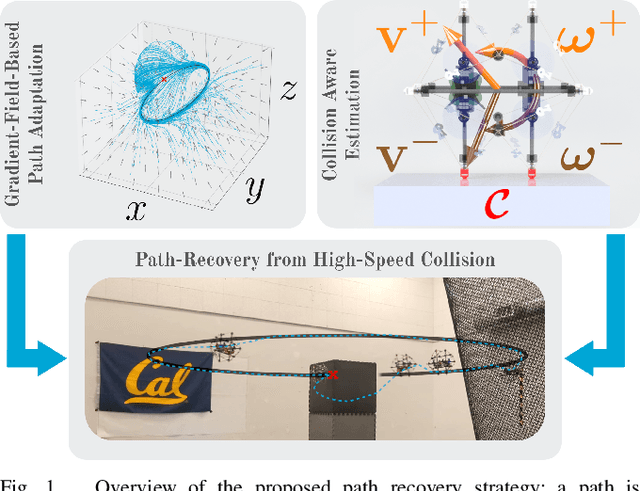
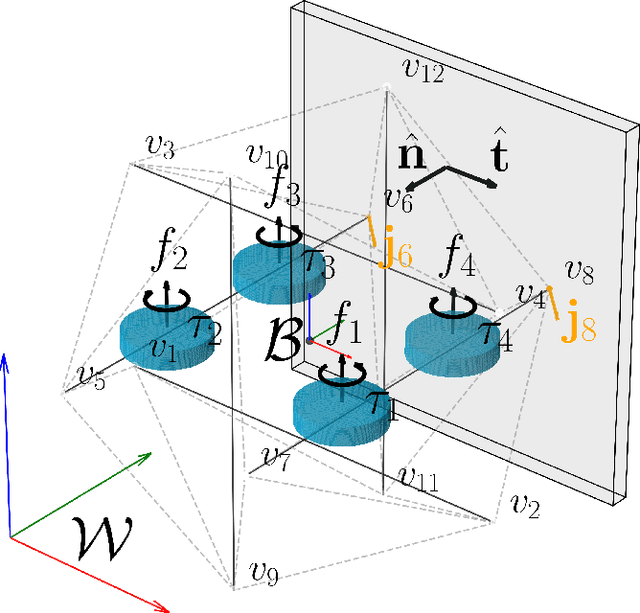

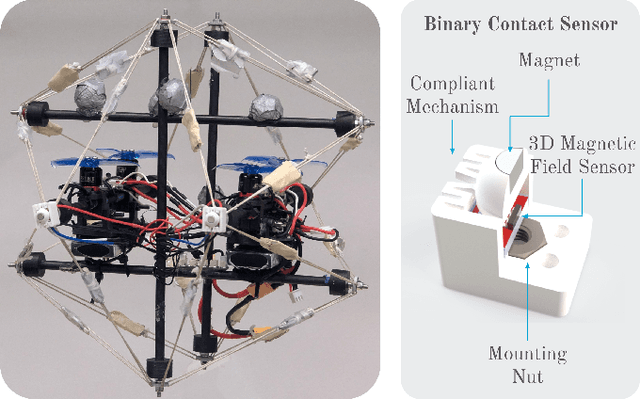
Aerial robots are a well-established solution for exploration, monitoring, and inspection, thanks to their superior maneuverability and agility. However, in many environments of interest, they risk crashing and sustaining damage following collisions. Traditional methods focus on avoiding obstacles entirely to prevent damage, but these approaches can be limiting, particularly in complex environments where collisions may be unavoidable, or on weight and compute-constrained platforms. This paper presents a novel approach to enhance the robustness and autonomy of drones in such scenarios by developing a path recovery and adjustment method for a high-speed collision-resistant drone equipped with binary contact sensors. The proposed system employs an estimator that explicitly models collisions, using pre-collision velocities and rates to predict post-collision dynamics, thereby improving the drone's state estimation accuracy. Additionally, we introduce a vector-field-based path representation which guarantees convergence to the path. Post-collision, the contact point is incorporated into the vector field as a repulsive potential, enabling the drone to avoid obstacles while naturally converging to the original path. The effectiveness of this method is validated through Monte Carlo simulations and demonstrated on a physical prototype, showing successful path following and adjustment through collisions as well as recovery from collisions at speeds up to 3.7 m / s.
Towards An Adaptive Compliant Aerial Manipulator for Contact-Based Interaction
Nov 29, 2017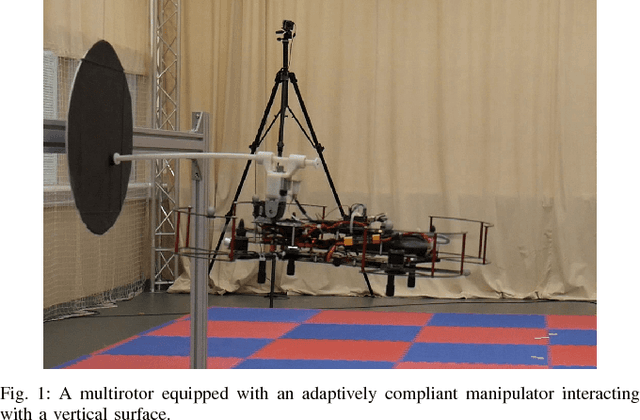
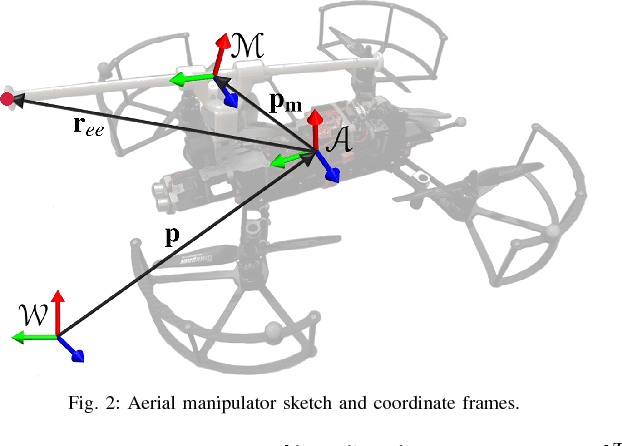
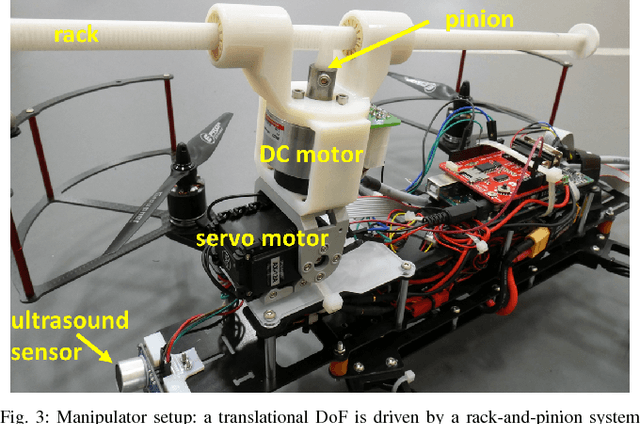
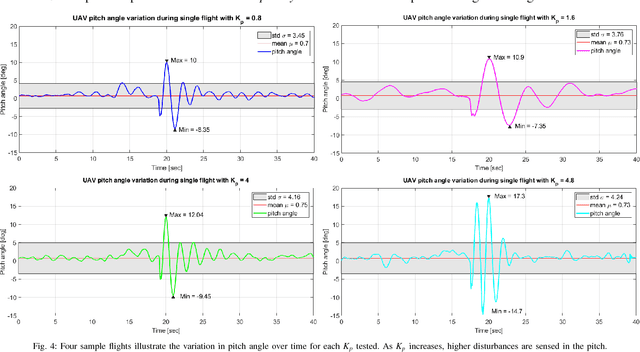
As roles for unmanned aerial vehicles (UAV) continue to diversify, the ability to sense and interact closely with the environment becomes increasingly important. Within this paper we report on the initial flight tests of a novel adaptive compliant actuator which will allow a UAV to carry out such tasks as the "pick and placement" of remote sensors, structural testing and contact-based inspection. Three key results are discussed and presented; the ability to physically compensate impact forces or apply interaction forces by the UAV through the use of the active compliant manipulator; to be able to tailor these forces through tuning of the manipulator controller gains; and the ability to apply a rapid series of physical pulses in order to excite remotely placed sensors, e.g. vibration sensors. The paper describes the overall system requirements and system modelling considerations which have driven the concept through to flight testing. A series of over sixty flight tests have been used to generate initial results which clearly demonstrate the potential of this new type of compliant aerial actuator. Results are discussed in line with potential applications; and a series of future flight tests are described which will enable us to refine and characterise the overall system.