 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgricultural Robotics: The Future of Robotic Agriculture
Aug 02, 2018Agri-Food is the largest manufacturing sector in the UK. It supports a food chain that generates over {\pounds}108bn p.a., with 3.9m employees in a truly international industry and exports {\pounds}20bn of UK manufactured goods. However, the global food chain is under pressure from population growth, climate change, political pressures affecting migration, population drift from rural to urban regions and the demographics of an aging global population. These challenges are recognised in the UK Industrial Strategy white paper and backed by significant investment via a Wave 2 Industrial Challenge Fund Investment ("Transforming Food Production: from Farm to Fork"). Robotics and Autonomous Systems (RAS) and associated digital technologies are now seen as enablers of this critical food chain transformation. To meet these challenges, this white paper reviews the state of the art in the application of RAS in Agri-Food production and explores research and innovation needs to ensure these technologies reach their full potential and deliver the necessary impacts in the Agri-Food sector.
Towards An Adaptive Compliant Aerial Manipulator for Contact-Based Interaction
Nov 29, 2017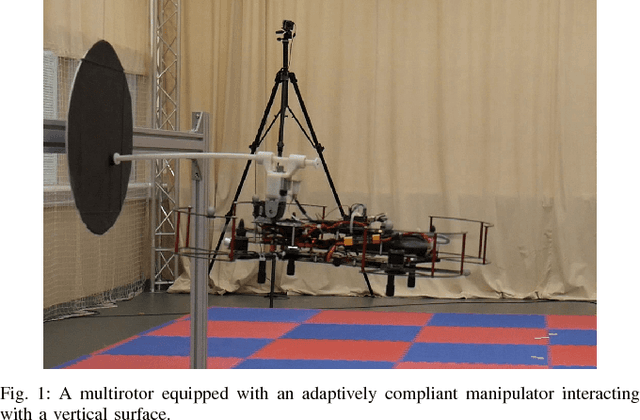
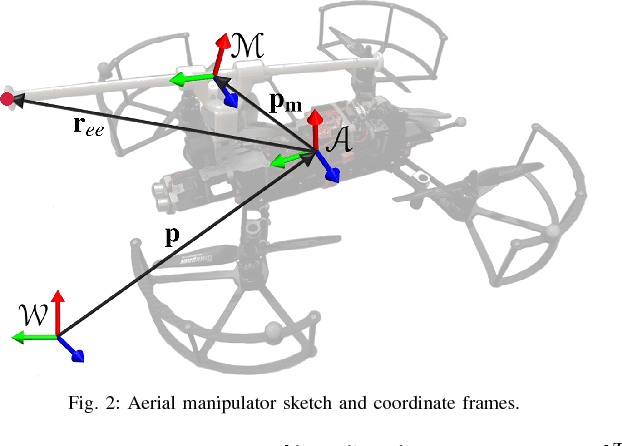
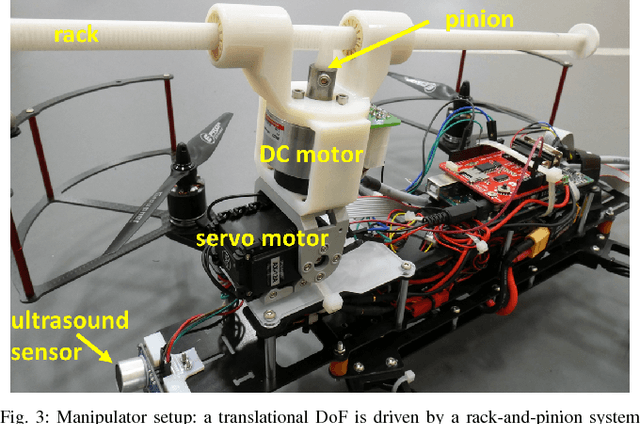
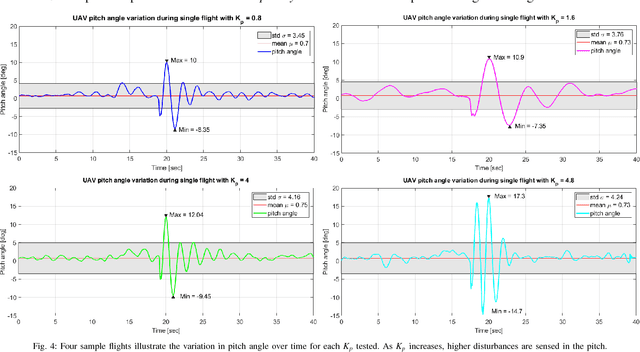
As roles for unmanned aerial vehicles (UAV) continue to diversify, the ability to sense and interact closely with the environment becomes increasingly important. Within this paper we report on the initial flight tests of a novel adaptive compliant actuator which will allow a UAV to carry out such tasks as the "pick and placement" of remote sensors, structural testing and contact-based inspection. Three key results are discussed and presented; the ability to physically compensate impact forces or apply interaction forces by the UAV through the use of the active compliant manipulator; to be able to tailor these forces through tuning of the manipulator controller gains; and the ability to apply a rapid series of physical pulses in order to excite remotely placed sensors, e.g. vibration sensors. The paper describes the overall system requirements and system modelling considerations which have driven the concept through to flight testing. A series of over sixty flight tests have been used to generate initial results which clearly demonstrate the potential of this new type of compliant aerial actuator. Results are discussed in line with potential applications; and a series of future flight tests are described which will enable us to refine and characterise the overall system.