 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards An Adaptive Compliant Aerial Manipulator for Contact-Based Interaction
Paper and Code
Nov 29, 2017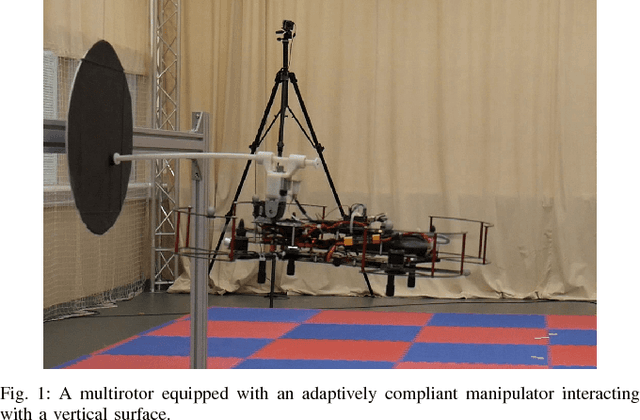
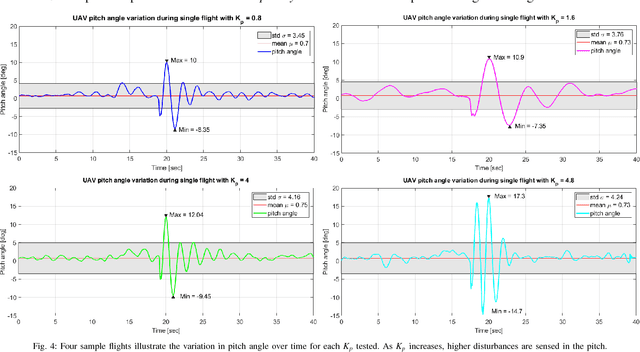
As roles for unmanned aerial vehicles (UAV) continue to diversify, the ability to sense and interact closely with the environment becomes increasingly important. Within this paper we report on the initial flight tests of a novel adaptive compliant actuator which will allow a UAV to carry out such tasks as the "pick and placement" of remote sensors, structural testing and contact-based inspection. Three key results are discussed and presented; the ability to physically compensate impact forces or apply interaction forces by the UAV through the use of the active compliant manipulator; to be able to tailor these forces through tuning of the manipulator controller gains; and the ability to apply a rapid series of physical pulses in order to excite remotely placed sensors, e.g. vibration sensors. The paper describes the overall system requirements and system modelling considerations which have driven the concept through to flight testing. A series of over sixty flight tests have been used to generate initial results which clearly demonstrate the potential of this new type of compliant aerial actuator. Results are discussed in line with potential applications; and a series of future flight tests are described which will enable us to refine and characterise the overall system.