 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
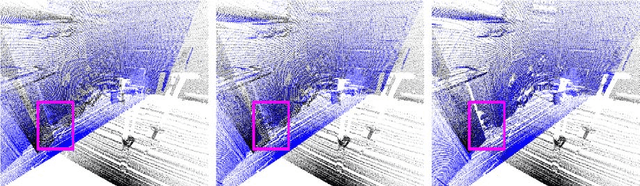
Add to EdgeDoppler-SLAM: Doppler-Aided Radar-Inertial and LiDAR-Inertial Simultaneous Localization and Mapping
Apr 15, 2025Simultaneous localization and mapping (SLAM) is a critical capability for autonomous systems. Traditional SLAM approaches, which often rely on visual or LiDAR sensors, face significant challenges in adverse conditions such as low light or featureless environments. To overcome these limitations, we propose a novel Doppler-aided radar-inertial and LiDAR-inertial SLAM framework that leverages the complementary strengths of 4D radar, FMCW LiDAR, and inertial measurement units. Our system integrates Doppler velocity measurements and spatial data into a tightly-coupled front-end and graph optimization back-end to provide enhanced ego velocity estimation, accurate odometry, and robust mapping. We also introduce a Doppler-based scan-matching technique to improve front-end odometry in dynamic environments. In addition, our framework incorporates an innovative online extrinsic calibration mechanism, utilizing Doppler velocity and loop closure to dynamically maintain sensor alignment. Extensive evaluations on both public and proprietary datasets show that our system significantly outperforms state-of-the-art radar-SLAM and LiDAR-SLAM frameworks in terms of accuracy and robustness. To encourage further research, the code of our Doppler-SLAM and our dataset are available at: https://github.com/Wayne-DWA/Doppler-SLAM.
Dynamics of spherical telescopic linear driven rotation robots
Apr 14, 2024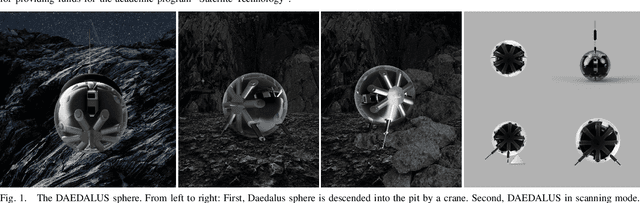
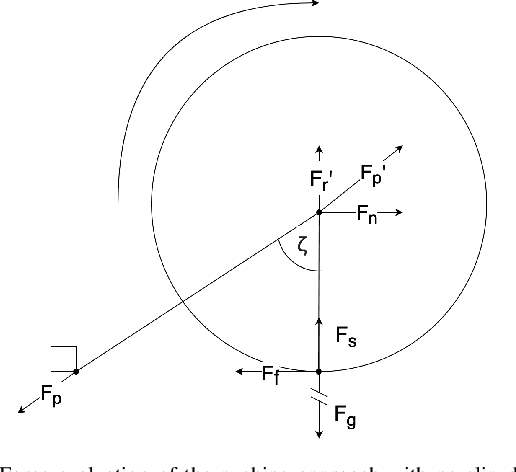
Lunar caves are promising features for long-term and permanent human presence on the moon. However, given their inaccessibility to imaging from survey satellites, the concrete environment within the underground cavities is not well known. Thus, to further the efforts of human presence on the moon, these caves are to be explored by robotic systems. However, a set of environmental factors make this exploration particularly challenging. Among those are the very fine lunar dust that damages exposed sensors and actuators and the unknown composition of the surface and obstacles within the cavity. One robotic system that is particularly fit to meet these challenges is that of a spherical robot, as the exterior shell completely separates the sensors and actuators from the hazardous environment. This work introduces the mathematical description in the form of a dynamic model of a novel locomotion approach for this form factor that adds additional functionality. A set of telescopic linearly extending rods moves the robot using a combination of pushing away from the ground and leveraging the gravitational torque. The approach allows the system to locomote, overcome objects by hoisting its center of gravity on top, and transform into a terrestrial laser scanner by using the rods as a tripod.
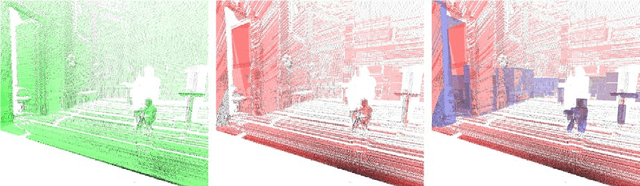
Uni-Fusion: Universal Continuous Mapping
Mar 22, 2023We introduce Uni-Fusion, an universal continuous mapping framework for surfaces, surface properties (color, infrared, etc.) and more (latent features in CLIP embedding space, etc.). We propose the first Universal Implicit Encoding model that supports encoding of both geometry and various types of properties (RGB, infrared, feature and etc.) without the need for any training. Based on that, our framework divides the point cloud into regular grid voxels and produces a latent feature in each voxel to form a Latent Implicit Map (LIM) for geometries and arbitrary properties. Then, by fusing a Local LIM of new frame to Global LIM, an incremental reconstruction is approached. Encoded with corresponding types of data, our Latent Implicit Map is capable to generate continuous surfaces, surface properties fields, surface feature fields and any other possible options. To demonstrate the capabilities of our model, we implement three applications: (1) incremental reconstruction for surfaces and color (2) 2D-to-3D fabricated properties transfers (3) open-vocabulary scene understanding by producing a text CLIP feature field on surfaces. We evaluate Uni-Fusion by comparing in corresponding applications, from which, Uni-Fusion shows high flexibility to various of application while performing best or competitive. The project page of Uni-Fusion is available at https://jarrome.github.io/Uni-Fusion/
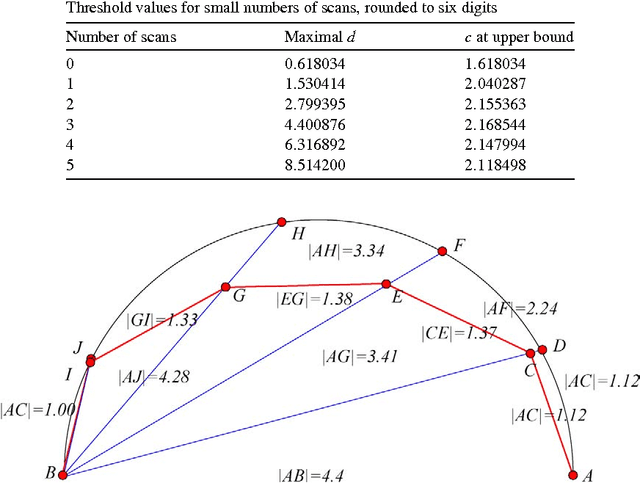
An Algorithm for the SE-Transformation on Neural Implicit Maps for Remapping Functions
Jun 17, 2022
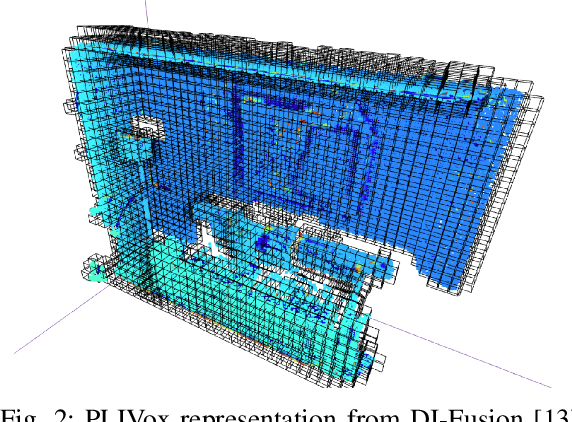
Implicit representations are widely used for object reconstruction due to their efficiency and flexibility. In 2021, a novel structure named neural implicit map has been invented for incremental reconstruction. A neural implicit map alleviates the problem of inefficient memory cost of previous online 3D dense reconstruction while producing better quality. % However, the neural implicit map suffers the limitation that it does not support remapping as the frames of scans are encoded into a deep prior after generating the neural implicit map. This means, that neither this generation process is invertible, nor a deep prior is transformable. The non-remappable property makes it not possible to apply loop-closure techniques. % We present a neural implicit map based transformation algorithm to fill this gap. As our neural implicit map is transformable, our model supports remapping for this special map of latent features. % Experiments show that our remapping module is capable to well-transform neural implicit maps to new poses. Embedded into a SLAM framework, our mapping model is able to tackle the remapping of loop closures and demonstrates high-quality surface reconstruction. % Our implementation is available at github\footnote{\url{https://github.com/Jarrome/IMT_Mapping}} for the research community.
Indirect Point Cloud Registration: Aligning Distance Fields using a Pseudo Third Point Ses
May 31, 2022
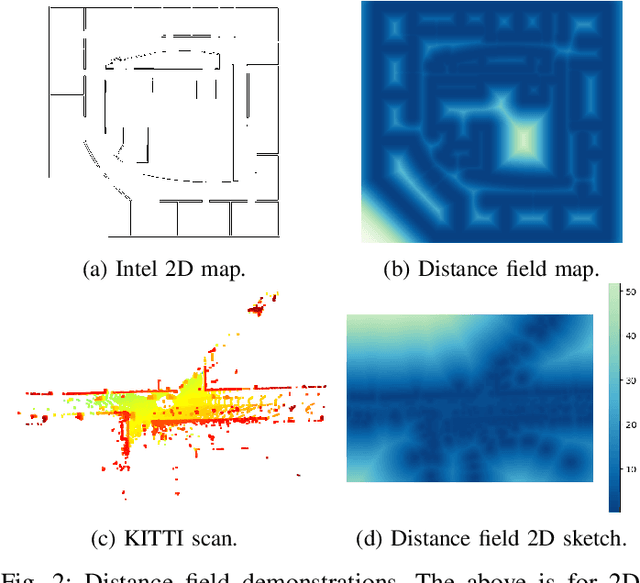
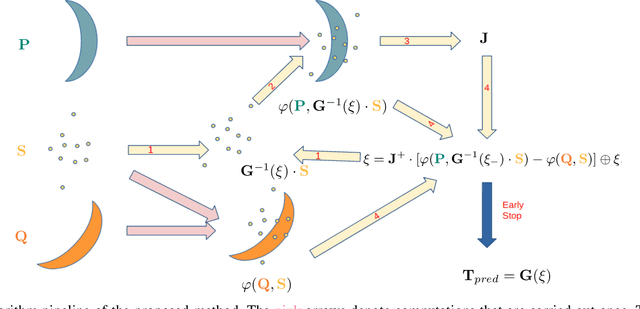
In recent years, implicit functions have drawn attention in the field of 3D reconstruction and have successfully been applied with Deep Learning. However, for incremental reconstruction, implicit function-based registrations have been rarely explored. Inspired by the high precision of deep learning global feature registration, we propose to combine this with distance fields. We generalize the algorithm to a non-Deep Learning setting while retaining the accuracy. Our algorithm is more accurate than conventional models while, without any training, it achieves a competitive performance and faster speed, compared to Deep Learning-based registration models. The implementation is available on github for the research community.
Online Searching with an Autonomous Robot
Apr 16, 2004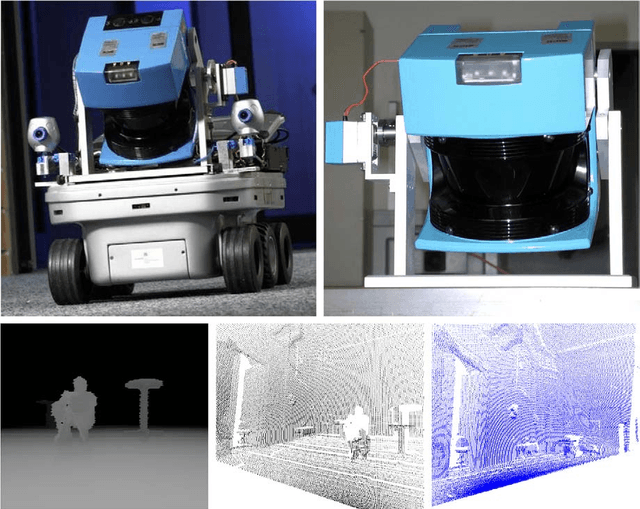
We discuss online strategies for visibility-based searching for an object hidden behind a corner, using Kurt3D, a real autonomous mobile robot. This task is closely related to a number of well-studied problems. Our robot uses a three-dimensional laser scanner in a stop, scan, plan, go fashion for building a virtual three-dimensional environment. Besides planning trajectories and avoiding obstacles, Kurt3D is capable of identifying objects like a chair. We derive a practically useful and asymptotically optimal strategy that guarantees a competitive ratio of 2, which differs remarkably from the well-studied scenario without the need of stopping for surveying the environment. Our strategy is used by Kurt3D, documented in a separate video.