 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDoppler-SLAM: Doppler-Aided Radar-Inertial and LiDAR-Inertial Simultaneous Localization and Mapping
Apr 15, 2025Simultaneous localization and mapping (SLAM) is a critical capability for autonomous systems. Traditional SLAM approaches, which often rely on visual or LiDAR sensors, face significant challenges in adverse conditions such as low light or featureless environments. To overcome these limitations, we propose a novel Doppler-aided radar-inertial and LiDAR-inertial SLAM framework that leverages the complementary strengths of 4D radar, FMCW LiDAR, and inertial measurement units. Our system integrates Doppler velocity measurements and spatial data into a tightly-coupled front-end and graph optimization back-end to provide enhanced ego velocity estimation, accurate odometry, and robust mapping. We also introduce a Doppler-based scan-matching technique to improve front-end odometry in dynamic environments. In addition, our framework incorporates an innovative online extrinsic calibration mechanism, utilizing Doppler velocity and loop closure to dynamically maintain sensor alignment. Extensive evaluations on both public and proprietary datasets show that our system significantly outperforms state-of-the-art radar-SLAM and LiDAR-SLAM frameworks in terms of accuracy and robustness. To encourage further research, the code of our Doppler-SLAM and our dataset are available at: https://github.com/Wayne-DWA/Doppler-SLAM.
Rapidly-Exploring Random Graph Next-Best View Exploration for Ground Vehicles
Aug 02, 2021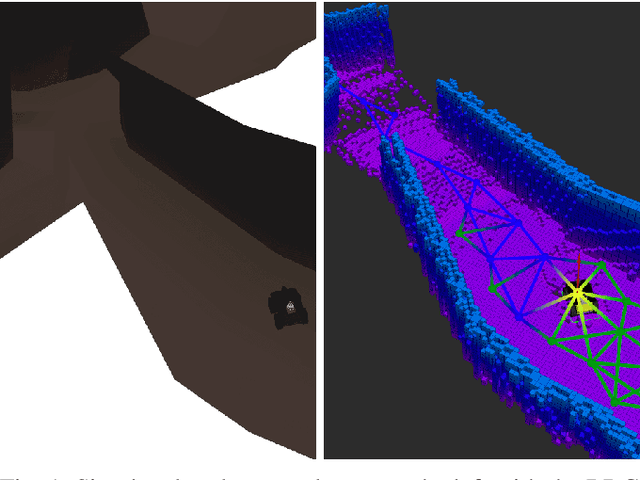



In this paper, a novel approach is introduced which utilizes a Rapidly-exploring Random Graph to improve sampling-based autonomous exploration of unknown environments with unmanned ground vehicles compared to the current state of the art. Its intended usage is in rescue scenarios in large indoor and underground environments with limited teleoperation ability. Local and global sampling are used to improve the exploration efficiency for large environments. Nodes are selected as the next exploration goal based on a gain-cost ratio derived from the assumed 3D map coverage at the particular node and the distance to it. The proposed approach features a continuously-built graph with a decoupled calculation of node gains using a computationally efficient ray tracing method. The Next-Best View is evaluated while the robot is pursuing a goal, which eliminates the need to wait for gain calculation after reaching the previous goal and significantly speeds up the exploration. Furthermore, a grid map is used to determine the traversability between the nodes in the graph while also providing a global plan for navigating towards selected goals. Simulations compare the proposed approach to state-of-the-art exploration algorithms and demonstrate its superior performance.