 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConverting Depth Images and Point Clouds for Feature-based Pose Estimation
Oct 23, 2023In recent years, depth sensors have become more and more affordable and have found their way into a growing amount of robotic systems. However, mono- or multi-modal sensor registration, often a necessary step for further processing, faces many challenges on raw depth images or point clouds. This paper presents a method of converting depth data into images capable of visualizing spatial details that are basically hidden in traditional depth images. After noise removal, a neighborhood of points forms two normal vectors whose difference is encoded into this new conversion. Compared to Bearing Angle images, our method yields brighter, higher-contrast images with more visible contours and more details. We tested feature-based pose estimation of both conversions in a visual odometry task and RGB-D SLAM. For all tested features, AKAZE, ORB, SIFT, and SURF, our new Flexion images yield better results than Bearing Angle images and show great potential to bridge the gap between depth data and classical computer vision. Source code is available here: https://rlsch.github.io/depth-flexion-conversion.
Rapidly-Exploring Random Graph Next-Best View Exploration for Ground Vehicles
Aug 02, 2021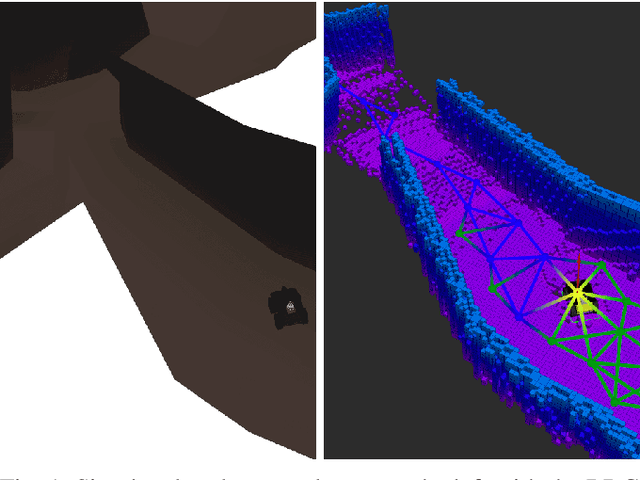



In this paper, a novel approach is introduced which utilizes a Rapidly-exploring Random Graph to improve sampling-based autonomous exploration of unknown environments with unmanned ground vehicles compared to the current state of the art. Its intended usage is in rescue scenarios in large indoor and underground environments with limited teleoperation ability. Local and global sampling are used to improve the exploration efficiency for large environments. Nodes are selected as the next exploration goal based on a gain-cost ratio derived from the assumed 3D map coverage at the particular node and the distance to it. The proposed approach features a continuously-built graph with a decoupled calculation of node gains using a computationally efficient ray tracing method. The Next-Best View is evaluated while the robot is pursuing a goal, which eliminates the need to wait for gain calculation after reaching the previous goal and significantly speeds up the exploration. Furthermore, a grid map is used to determine the traversability between the nodes in the graph while also providing a global plan for navigating towards selected goals. Simulations compare the proposed approach to state-of-the-art exploration algorithms and demonstrate its superior performance.