 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEdge Radar Material Classification Under Geometry Shifts
Mar 24, 2026Material awareness can improve robotic navigation and interaction, particularly in conditions where cameras and LiDAR degrade. We present a lightweight mmWave radar material classification pipeline designed for ultra-low-power edge devices (TI IWRL6432), using compact range-bin intensity descriptors and a Multilayer Perceptron (MLP) for real-time inference. While the classifier reaches a macro-F1 of 94.2\% under the nominal training geometry, we observe a pronounced performance drop under realistic geometry shifts, including sensor height changes and small tilt angles. These perturbations induce systematic intensity scaling and angle-dependent radar cross section (RCS) effects, pushing features out of distribution and reducing macro-F1 to around 68.5\%. We analyze these failure modes and outline practical directions for improving robustness with normalization, geometry augmentation, and motion-aware features.
UWB Anchor Based Localization of a Planetary Rover
Apr 10, 2025



Localization of an autonomous mobile robot during planetary exploration is challenging due to the unknown terrain, the difficult lighting conditions and the lack of any global reference such as satellite navigation systems. We present a novel approach for robot localization based on ultra-wideband (UWB) technology. The robot sets up its own reference coordinate system by distributing UWB anchor nodes in the environment via a rocket-propelled launcher system. This allows the creation of a localization space in which UWB measurements are employed to supplement traditional SLAM-based techniques. The system was developed for our involvement in the ESA-ESRIC challenge 2021 and the AMADEE-24, an analog Mars simulation in Armenia by the Austrian Space Forum (\"OWF).
SceneFactory: A Workflow-centric and Unified Framework for Incremental Scene Modeling
May 13, 2024



We present SceneFactory, a workflow-centric and unified framework for incremental scene modeling, that supports conveniently a wide range of applications, such as (unposed and/or uncalibrated) multi-view depth estimation, LiDAR completion, (dense) RGB-D/RGB-L/Mono//Depth-only reconstruction and SLAM. The workflow-centric design uses multiple blocks as the basis for building different production lines. The supported applications, i.e., productions avoid redundancy in their designs. Thus, the focus is on each block itself for independent expansion. To support all input combinations, our implementation consists of four building blocks in SceneFactory: (1) Mono-SLAM, (2) depth estimation, (3) flexion and (4) scene reconstruction. Furthermore, we propose an unposed & uncalibrated multi-view depth estimation model (U2-MVD) to estimate dense geometry. U2-MVD exploits dense bundle adjustment for solving for poses, intrinsics, and inverse depth. Then a semantic-awared ScaleCov step is introduced to complete the multi-view depth. Relying on U2-MVD, SceneFactory both supports user-friendly 3D creation (with just images) and bridges the applications of Dense RGB-D and Dense Mono. For high quality surface and color reconstruction, we propose due-purpose Multi-resolutional Neural Points (DM-NPs) for the first surface accessible Surface Color Field design, where we introduce Improved Point Rasterization (IPR) for point cloud based surface query. We implement and experiment with SceneFactory to demonstrate its broad practicability and high flexibility. Its quality also competes or exceeds the tightly-coupled state of the art approaches in all tasks. We contribute the code to the community (https://jarrome.github.io/).
Trajectory Optimization and Following for a Three Degrees of Freedom Overactuated Floating Platform
Jul 21, 2022
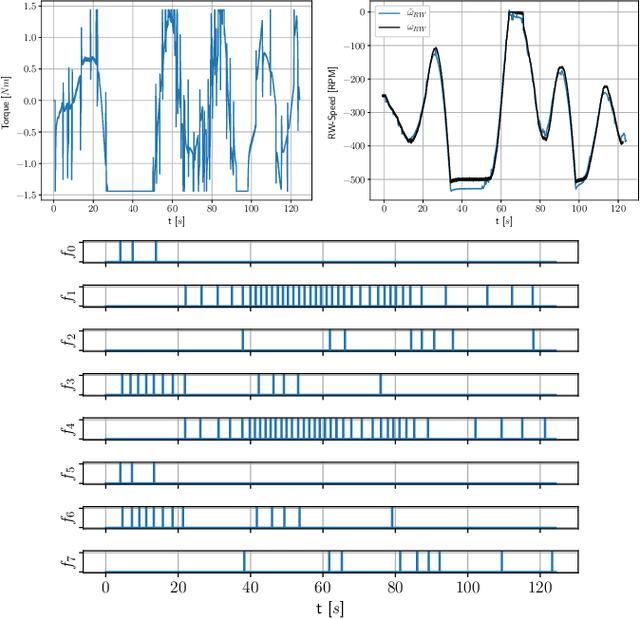
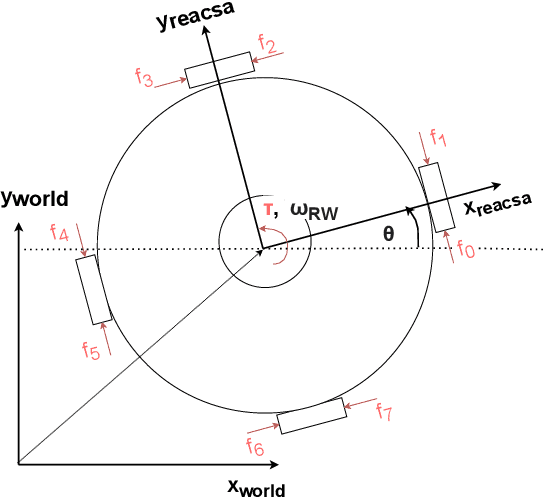
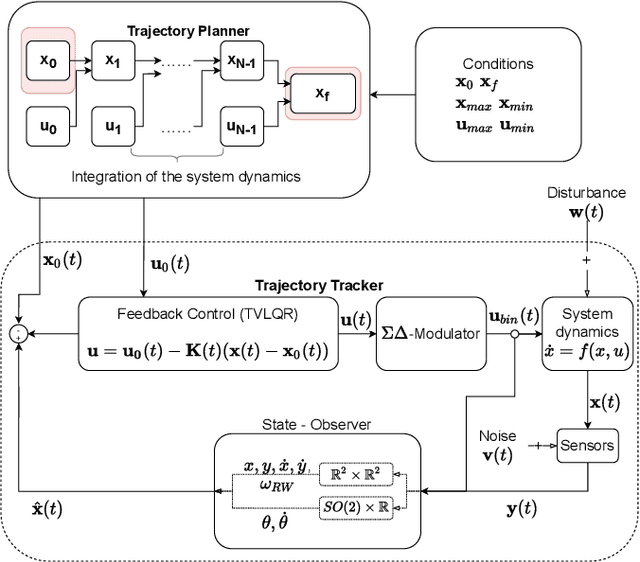
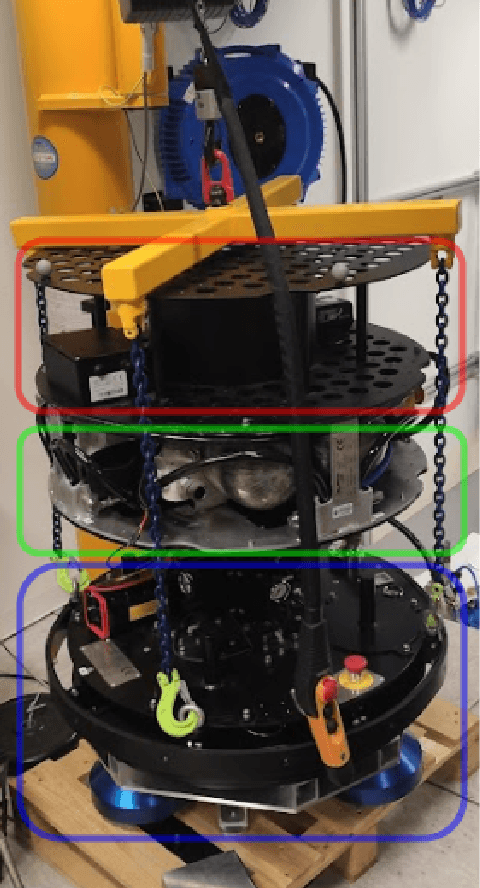
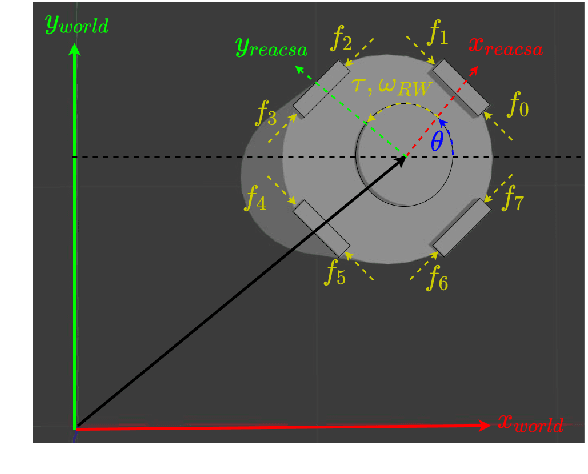
Space robotics applications, such as Active Space Debris Removal (ASDR), require representative testing before launch. A commonly used approach to emulate the microgravity environment in space is air-bearing based platforms on flat-floors, such as the European Space Agency's Orbital Robotics and GNC Lab (ORGL). This work proposes a control architecture for a floating platform at the ORGL, equipped with eight solenoid-valve-based thrusters and one reaction wheel. The control architecture consists of two main components: a trajectory planner that finds optimal trajectories connecting two states and a trajectory follower that follows any physically feasible trajectory. The controller is first evaluated within an introduced simulation, achieving a 100 % success rate at finding and following trajectories to the origin within a Monte-Carlo test. Individual trajectories are also successfully followed by the physical system. In this work, we showcase the ability of the controller to reject disturbances and follow a straight-line trajectory within tens of centimeters.
Finding and Following Optimal Trajectories for an Overactuated Floating Robotic Platform
Jun 08, 2022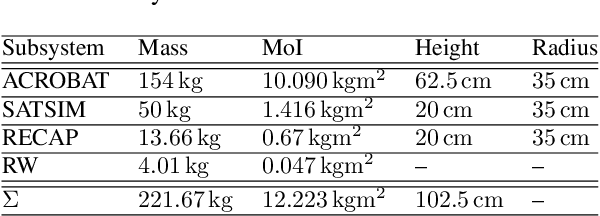

The recent increase in yearly spacecraft launches and the high number of planned launches have raised questions about maintaining accessibility to space for all interested parties. A key to sustaining the future of space-flight is the ability to service malfunctioning - and actively remove dysfunctional spacecraft from orbit. Robotic platforms that autonomously perform these tasks are a topic of ongoing research and thus must undergo thorough testing before launch. For representative system-level testing, the European Space Agency (ESA) uses, among other things, the Orbital Robotics and GNC Lab (ORGL), a flat-floor facility where air-bearing based platforms exhibit free-floating behavior in three Degrees of Freedom (DoF). This work introduces a representative simulation of a free-floating platform in the testing environment and a software framework for controller development. Finally, this work proposes a controller within that framework for finding and following optimal trajectories between arbitrary states, which is evaluated in simulation and reality.
Self-supervised Point Set Local Descriptors for Point Cloud Registration
Mar 11, 2020
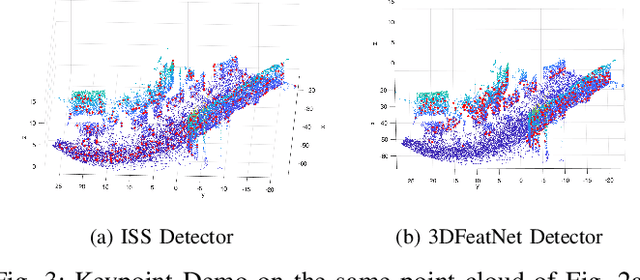
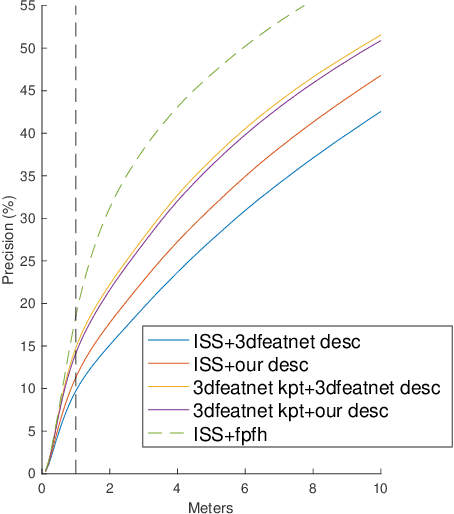
In this work, we propose to learn local descriptors for point clouds in a self-supervised manner. In each iteration of the training, the input of the network is merely one unlabeled point cloud. On top of our previous work, that directly solves the transformation between two point sets in one step without correspondences, the proposed method is able to train from one point cloud, by supervising its self-rotation, that we randomly generate. The whole training requires no manual annotation. In several experiments we evaluate the performance of our method on various datasets and compare to other state of the art algorithms. The results show, that our self-supervised learned descriptor achieves equivalent or even better performance than the supervised learned model, while being easier to train and not requiring labeled data.
Non-iterative One-step Solution for Point Set Registration Problem on Pose Estimation without Correspondence
Mar 01, 2020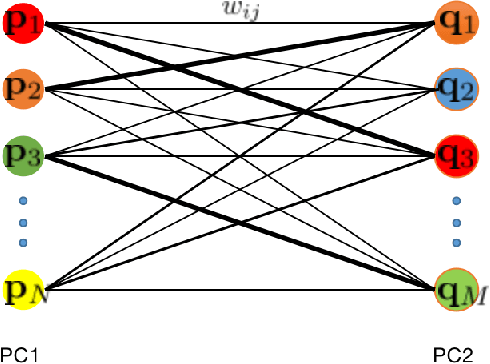
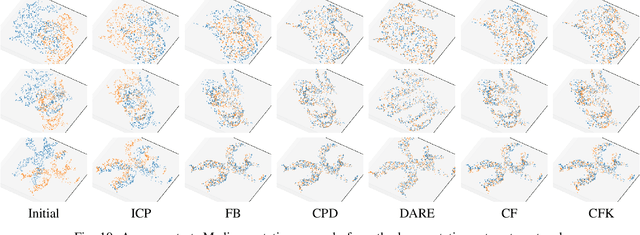
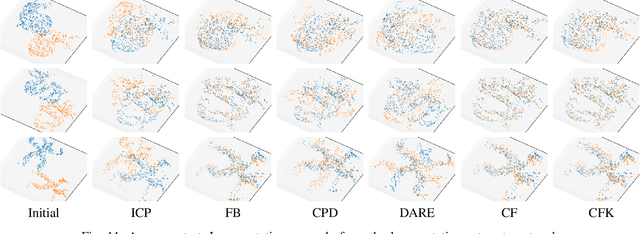
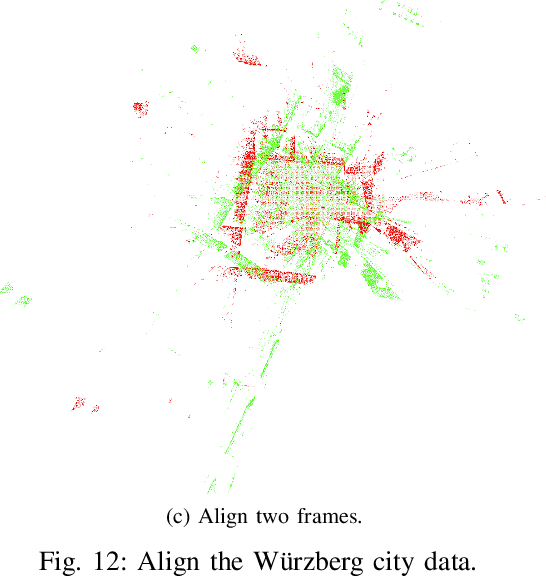
In this work, we propose to directly find the one-step solution for the point set registration problem without correspondences. Inspired by the Kernel Correlation method, we consider the full connected objective function between two point sets, thus avoiding the computation of correspondences. By utilizing least square minimization the transformed objective function is directly solved with existing well-known closed-form solutions, e.g., singular value decomposition, that is usually used for given correspondences. However, using equal weights of costs for each connection will degenerate the solution due to the large influence of distant pairs. Thus, we additionally set a scale on each term to avoid the high cost on non-important pairs. As in feature-based registration methods, the similarity between descriptors of points determines the scaling weight. Given the weights we yield a one step solution. As the runtime is in $\mathcal O (n^2)$, we also propose a variant with keypoints that strongly reduce the cost. The experiments show, that our proposed method gives a one-step solution without an initial guess. Our method exhibits competitive outliers robustness, accuracy compared with various methods. And it is more stable to large rotation. In addition, though feature based algorithms are more sensitive to noise, Our method still provide better result compared with the feature match initialized ICP.