 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSS-VAERR: Self-Supervised Apparent Emotional Reaction Recognition from Video
Oct 20, 2022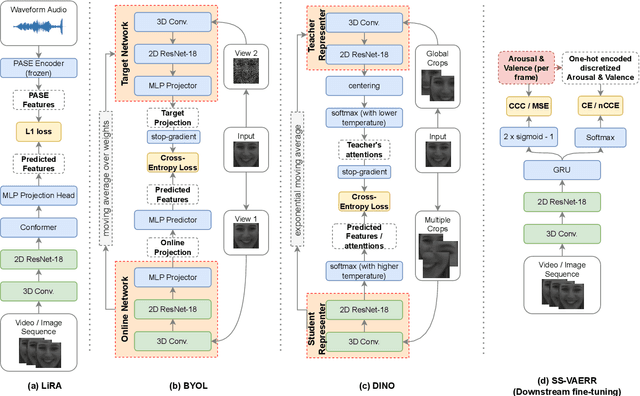
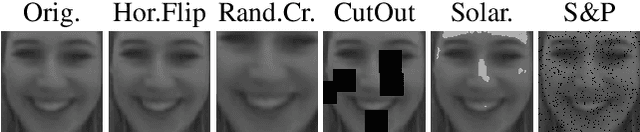
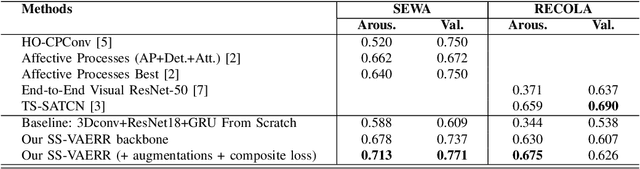
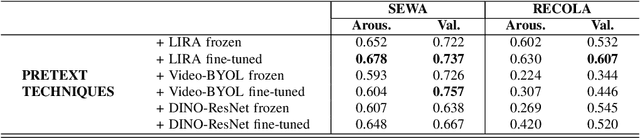
This work focuses on the apparent emotional reaction recognition (AERR) from the video-only input, conducted in a self-supervised fashion. The network is first pre-trained on different self-supervised pretext tasks and later fine-tuned on the downstream target task. Self-supervised learning facilitates the use of pre-trained architectures and larger datasets that might be deemed unfit for the target task and yet might be useful to learn informative representations and hence provide useful initializations for further fine-tuning on smaller more suitable data. Our presented contribution is two-fold: (1) an analysis of different state-of-the-art (SOTA) pretext tasks for the video-only apparent emotional reaction recognition architecture, and (2) an analysis of various combinations of the regression and classification losses that are likely to improve the performance further. Together these two contributions result in the current state-of-the-art performance for the video-only spontaneous apparent emotional reaction recognition with continuous annotations.
Survey: Leakage and Privacy at Inference Time
Jul 04, 2021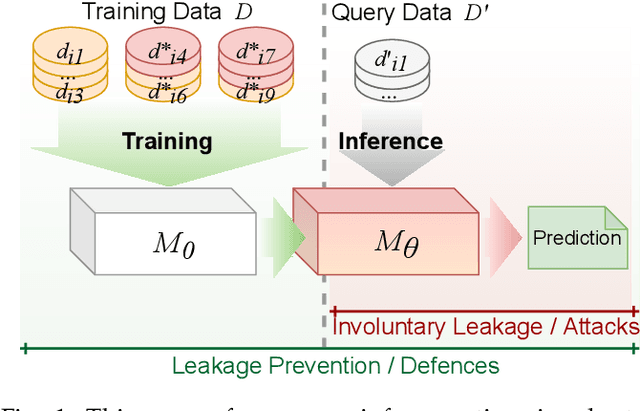
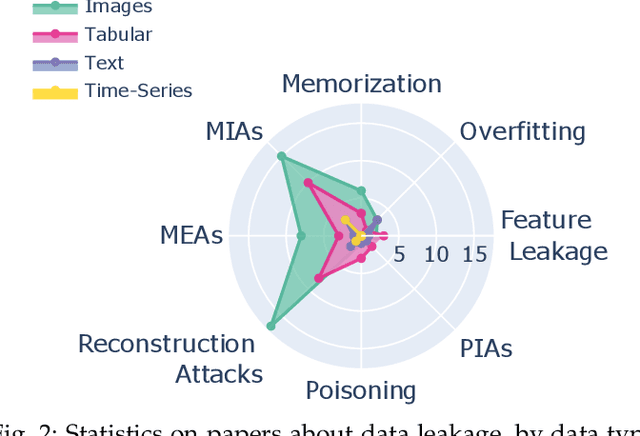
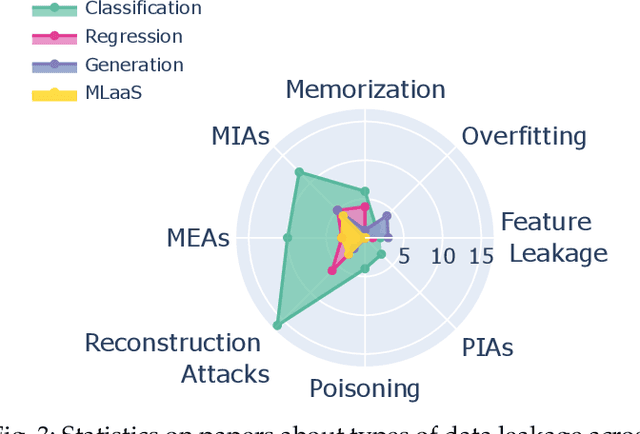
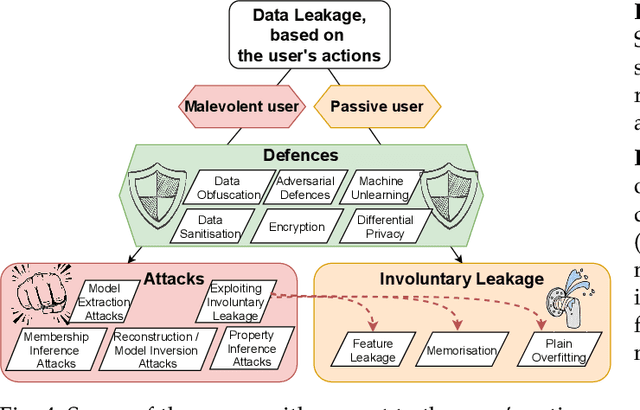
Leakage of data from publicly available Machine Learning (ML) models is an area of growing significance as commercial and government applications of ML can draw on multiple sources of data, potentially including users' and clients' sensitive data. We provide a comprehensive survey of contemporary advances on several fronts, covering involuntary data leakage which is natural to ML models, potential malevolent leakage which is caused by privacy attacks, and currently available defence mechanisms. We focus on inference-time leakage, as the most likely scenario for publicly available models. We first discuss what leakage is in the context of different data, tasks, and model architectures. We then propose a taxonomy across involuntary and malevolent leakage, available defences, followed by the currently available assessment metrics and applications. We conclude with outstanding challenges and open questions, outlining some promising directions for future research.
Similarity-based data mining for online domain adaptation of a sonar ATR system
Sep 16, 2020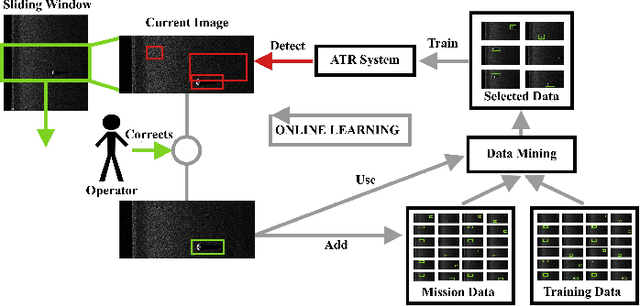
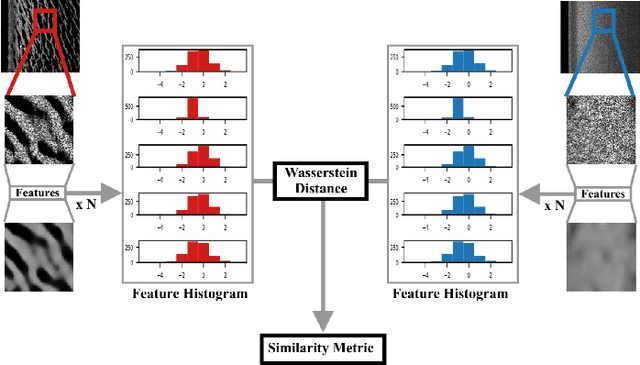
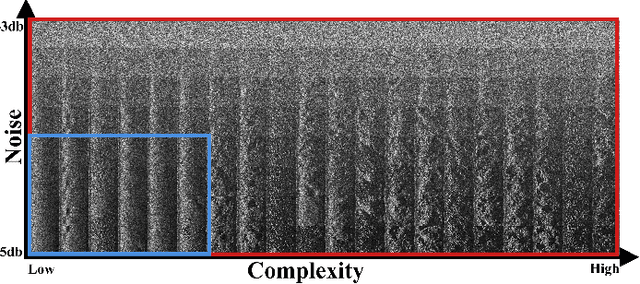

Due to the expensive nature of field data gathering, the lack of training data often limits the performance of Automatic Target Recognition (ATR) systems. This problem is often addressed with domain adaptation techniques, however the currently existing methods fail to satisfy the constraints of resource and time-limited underwater systems. We propose to address this issue via an online fine-tuning of the ATR algorithm using a novel data-selection method. Our proposed data-mining approach relies on visual similarity and outperforms the traditionally employed hard-mining methods. We present a comparative performance analysis in a wide range of simulated environments and highlight the benefits of using our method for the rapid adaptation to previously unseen environments.
* Accepted for publication in IEEE OCEANS2020
Adversarial Generation of Informative Trajectories for Dynamics System Identification
Mar 02, 2020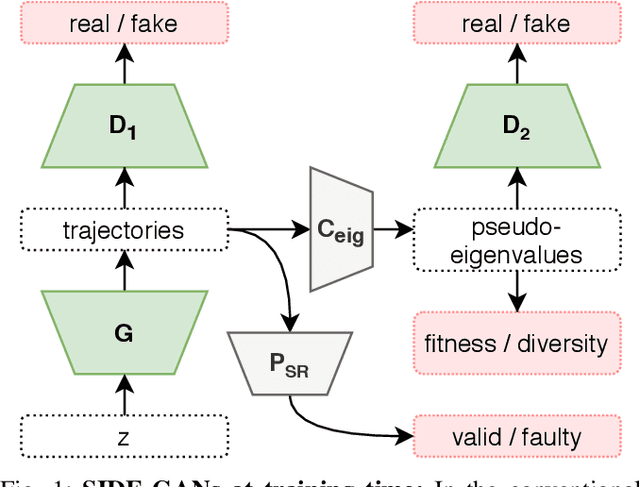
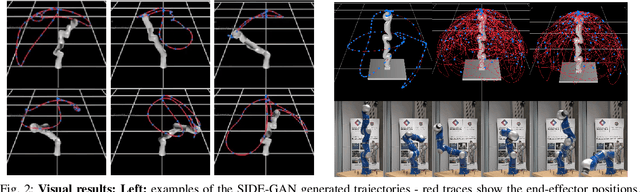
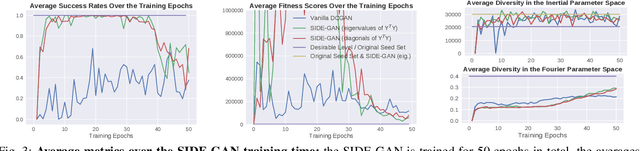
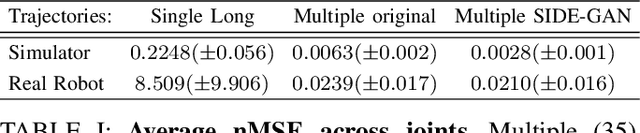
Dynamic System Identification approaches usually heavily rely on the evolutionary and gradient-based optimisation techniques to produce optimal excitation trajectories for determining the physical parameters of robot platforms. Current optimisation techniques tend to generate single trajectories. This is expensive, and intractable for longer trajectories, thus limiting their efficacy for system identification. We propose to tackle this issue by using multiple shorter cyclic trajectories, which can be generated in parallel, and subsequently combined together to achieve the same effect as a longer trajectory. Crucially, we show how to scale this approach even further by increasing the generation speed and quality of the dataset through the use of generative adversarial network (GAN) based architectures to produce a large databases of valid and diverse excitation trajectories. To the best of our knowledge, this is the first robotics work to explore system identification with multiple cyclic trajectories and to develop GAN-based techniques for scaleably producing excitation trajectories that are diverse in both control parameter and inertial parameter spaces. We show that our approach dramatically accelerates trajectory optimisation, while simultaneously providing more accurate system identification than the conventional approach.
Unlimited Resolution Image Generation with R2D2-GANs
Mar 02, 2020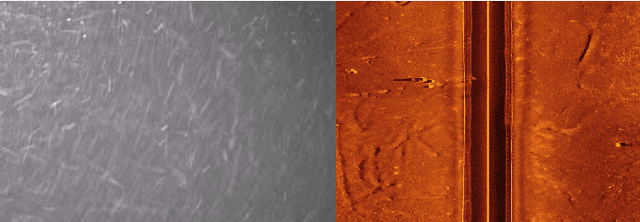
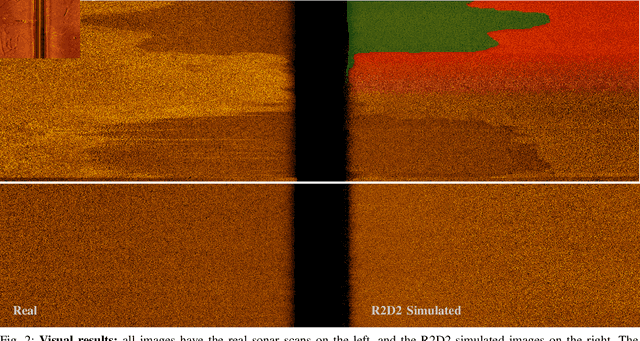
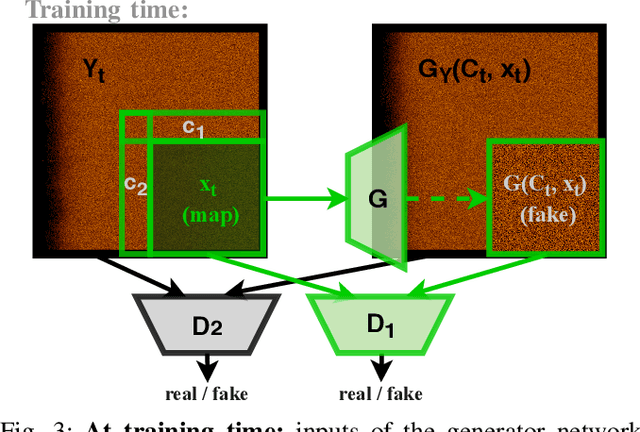
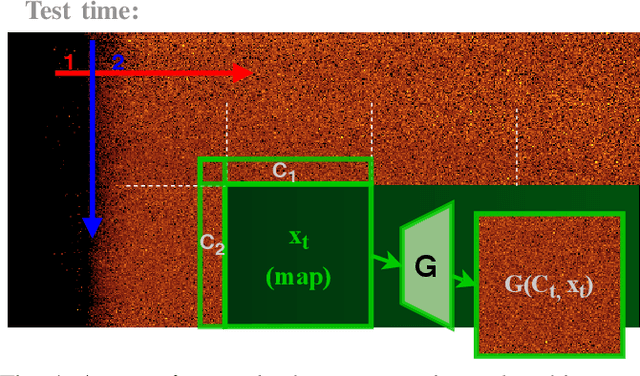
In this paper we present a novel simulation technique for generating high quality images of any predefined resolution. This method can be used to synthesize sonar scans of size equivalent to those collected during a full-length mission, with across track resolutions of any chosen magnitude. In essence, our model extends Generative Adversarial Networks (GANs) based architecture into a conditional recursive setting, that facilitates the continuity of the generated images. The data produced is continuous, realistically-looking, and can also be generated at least two times faster than the real speed of acquisition for the sonars with higher resolutions, such as EdgeTech. The seabed topography can be fully controlled by the user. The visual assessment tests demonstrate that humans cannot distinguish the simulated images from real. Moreover, experimental results suggest that in the absence of real data the autonomous recognition systems can benefit greatly from training with the synthetic data, produced by the R2D2-GANs.
Full-Scale Continuous Synthetic Sonar Data Generation with Markov Conditional Generative Adversarial Networks
Oct 15, 2019
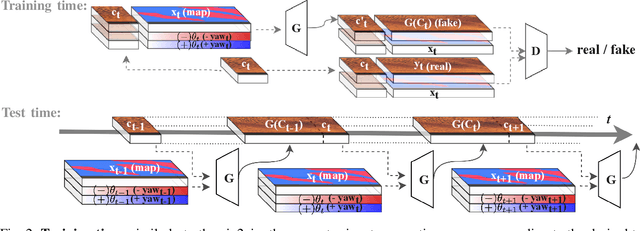
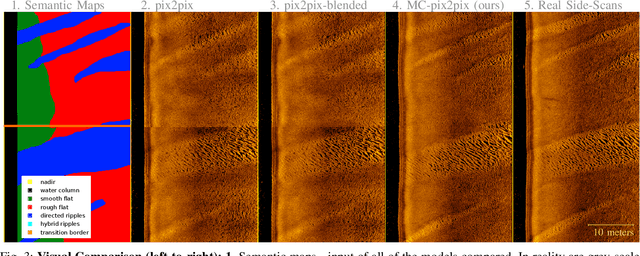
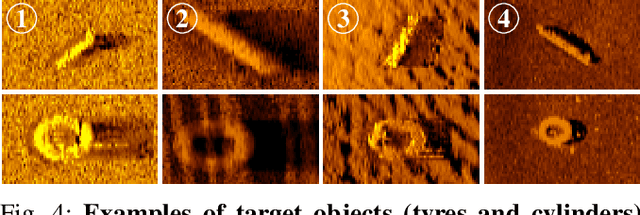
Deployment and operation of autonomous underwater vehicles is expensive and time-consuming. High-quality realistic sonar data simulation could be of benefit to multiple applications, including training of human operators for post-mission analysis, as well as tuning and validation of autonomous target recognition (ATR) systems for underwater vehicles. Producing realistic synthetic sonar imagery is a challenging problem as the model has to account for specific artefacts of real acoustic sensors, vehicle altitude, and a variety of environmental factors. We propose a novel method for generating realistic-looking sonar side-scans of full-length missions, called Markov Conditional pix2pix (MC-pix2pix). Quantitative assessment results confirm that the quality of the produced data is almost indistinguishable from real. Furthermore, we show that bootstrapping ATR systems with MC-pix2pix data can improve the performance. Synthetic data is generated 18 times faster than real acquisition speed, with full user control over the topography of the generated data.
Behavioural Repertoire via Generative Adversarial Policy Networks
Mar 06, 2019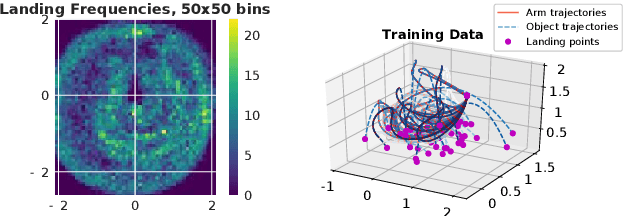
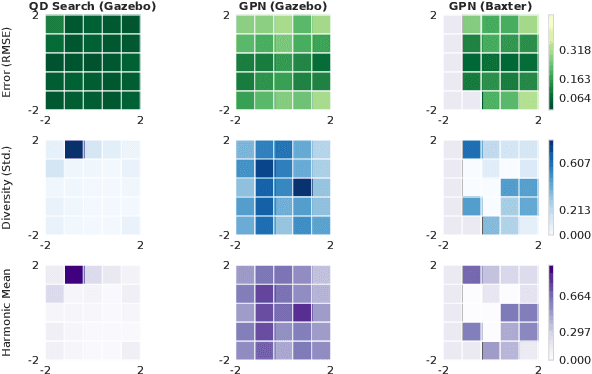
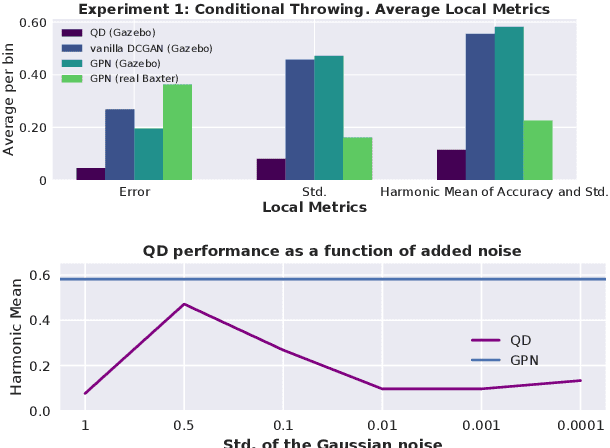

Learning algorithms are enabling robots to solve increasingly challenging real-world tasks. These approaches often rely on demonstrations and reproduce the behavior shown. Unexpected changes in the environment may require using different behaviors to achieve the same effect, for instance to reach and grasp an object in changing clutter. An emerging paradigm addressing this robustness issue is to learn a diverse set of successful behaviors for a given task, from which a robot can select the most suitable policy when faced with a new environment. In this paper, we explore a novel realization of this vision by learning a generative model over policies. Rather than learning a single policy, or a small fixed repertoire, our generative model for policies compactly encodes an unbounded number of policies and allows novel controller variants to be sampled. Leveraging our generative policy network, a robot can sample novel behaviors until it finds one that works for a new environment. We demonstrate this idea with an application of robust ball-throwing in the presence of obstacles. We show that this approach achieves a greater diversity of behaviors than an existing evolutionary approach, while maintaining good efficacy of sampled behaviors, allowing a Baxter robot to hit targets more often when ball throwing in the presence of obstacles.