 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnlimited Resolution Image Generation with R2D2-GANs
Mar 02, 2020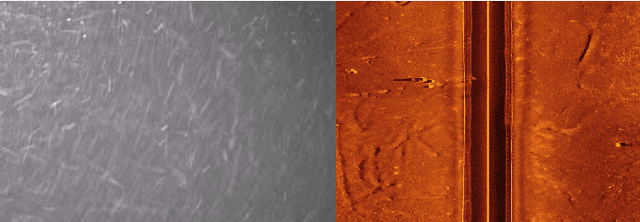
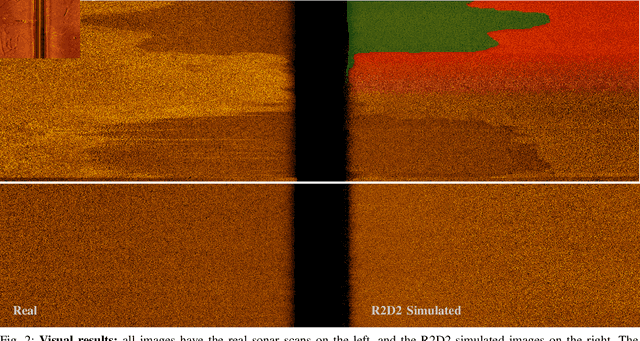
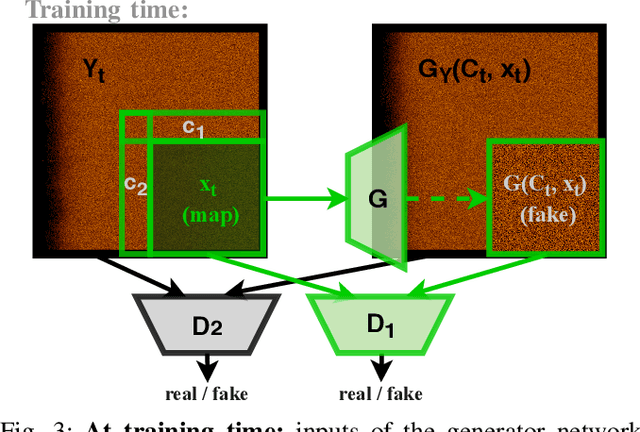
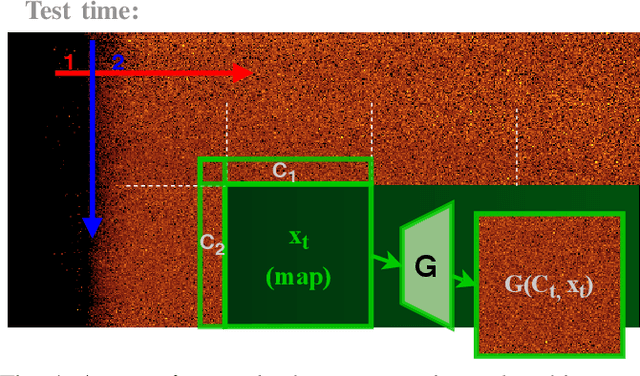
In this paper we present a novel simulation technique for generating high quality images of any predefined resolution. This method can be used to synthesize sonar scans of size equivalent to those collected during a full-length mission, with across track resolutions of any chosen magnitude. In essence, our model extends Generative Adversarial Networks (GANs) based architecture into a conditional recursive setting, that facilitates the continuity of the generated images. The data produced is continuous, realistically-looking, and can also be generated at least two times faster than the real speed of acquisition for the sonars with higher resolutions, such as EdgeTech. The seabed topography can be fully controlled by the user. The visual assessment tests demonstrate that humans cannot distinguish the simulated images from real. Moreover, experimental results suggest that in the absence of real data the autonomous recognition systems can benefit greatly from training with the synthetic data, produced by the R2D2-GANs.
Full-Scale Continuous Synthetic Sonar Data Generation with Markov Conditional Generative Adversarial Networks
Oct 15, 2019
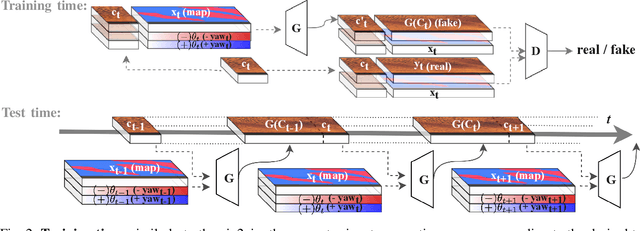
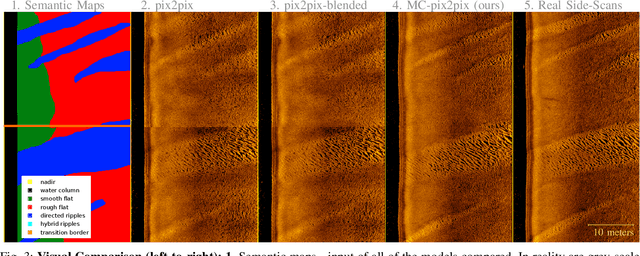
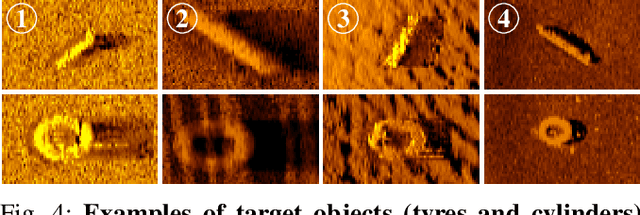
Deployment and operation of autonomous underwater vehicles is expensive and time-consuming. High-quality realistic sonar data simulation could be of benefit to multiple applications, including training of human operators for post-mission analysis, as well as tuning and validation of autonomous target recognition (ATR) systems for underwater vehicles. Producing realistic synthetic sonar imagery is a challenging problem as the model has to account for specific artefacts of real acoustic sensors, vehicle altitude, and a variety of environmental factors. We propose a novel method for generating realistic-looking sonar side-scans of full-length missions, called Markov Conditional pix2pix (MC-pix2pix). Quantitative assessment results confirm that the quality of the produced data is almost indistinguishable from real. Furthermore, we show that bootstrapping ATR systems with MC-pix2pix data can improve the performance. Synthetic data is generated 18 times faster than real acquisition speed, with full user control over the topography of the generated data.