 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFull-Scale Continuous Synthetic Sonar Data Generation with Markov Conditional Generative Adversarial Networks
Paper and Code
Oct 15, 2019
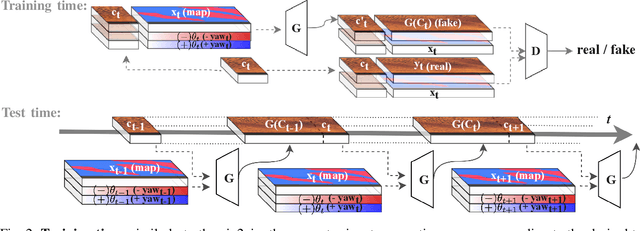
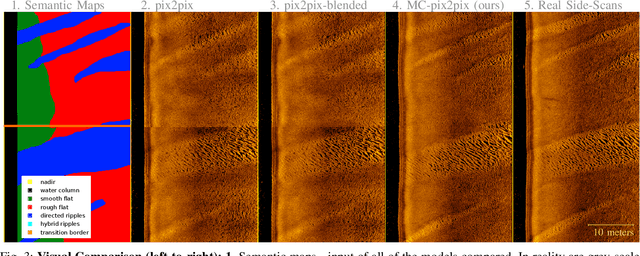
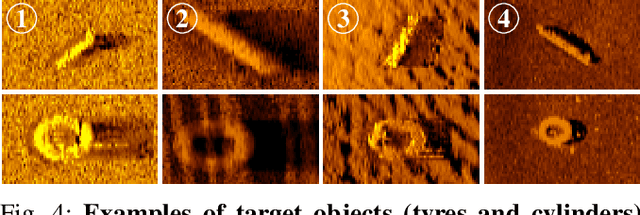
Deployment and operation of autonomous underwater vehicles is expensive and time-consuming. High-quality realistic sonar data simulation could be of benefit to multiple applications, including training of human operators for post-mission analysis, as well as tuning and validation of autonomous target recognition (ATR) systems for underwater vehicles. Producing realistic synthetic sonar imagery is a challenging problem as the model has to account for specific artefacts of real acoustic sensors, vehicle altitude, and a variety of environmental factors. We propose a novel method for generating realistic-looking sonar side-scans of full-length missions, called Markov Conditional pix2pix (MC-pix2pix). Quantitative assessment results confirm that the quality of the produced data is almost indistinguishable from real. Furthermore, we show that bootstrapping ATR systems with MC-pix2pix data can improve the performance. Synthetic data is generated 18 times faster than real acquisition speed, with full user control over the topography of the generated data.