 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBehavioural Repertoire via Generative Adversarial Policy Networks
Paper and Code
Mar 06, 2019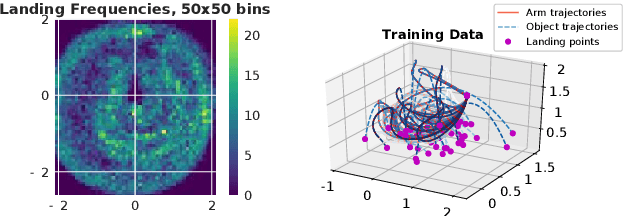
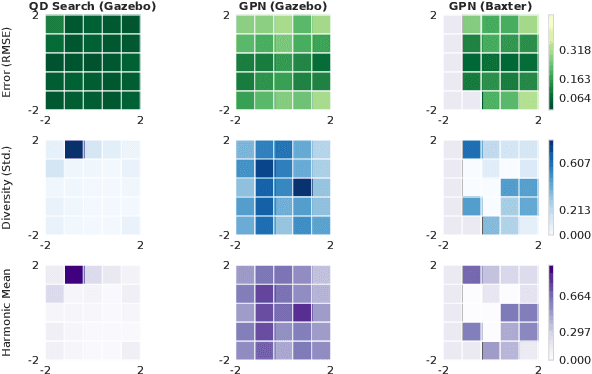
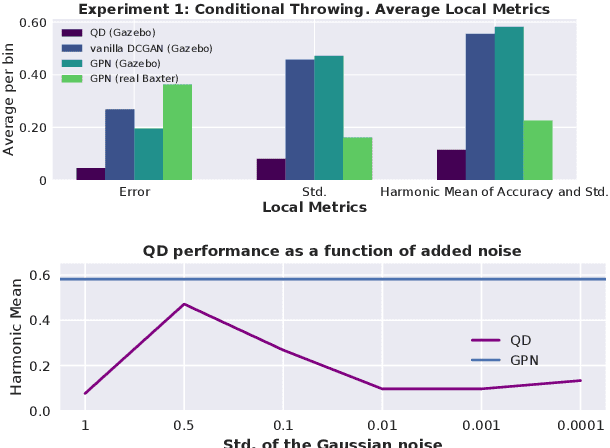

Learning algorithms are enabling robots to solve increasingly challenging real-world tasks. These approaches often rely on demonstrations and reproduce the behavior shown. Unexpected changes in the environment may require using different behaviors to achieve the same effect, for instance to reach and grasp an object in changing clutter. An emerging paradigm addressing this robustness issue is to learn a diverse set of successful behaviors for a given task, from which a robot can select the most suitable policy when faced with a new environment. In this paper, we explore a novel realization of this vision by learning a generative model over policies. Rather than learning a single policy, or a small fixed repertoire, our generative model for policies compactly encodes an unbounded number of policies and allows novel controller variants to be sampled. Leveraging our generative policy network, a robot can sample novel behaviors until it finds one that works for a new environment. We demonstrate this idea with an application of robust ball-throwing in the presence of obstacles. We show that this approach achieves a greater diversity of behaviors than an existing evolutionary approach, while maintaining good efficacy of sampled behaviors, allowing a Baxter robot to hit targets more often when ball throwing in the presence of obstacles.