 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Gripping: Specifying for Trustworthiness
Jul 03, 2023


Soft robotics is an emerging technology in which engineers create flexible devices for use in a variety of applications. In order to advance the wide adoption of soft robots, ensuring their trustworthiness is essential; if soft robots are not trusted, they will not be used to their full potential. In order to demonstrate trustworthiness, a specification needs to be formulated to define what is trustworthy. However, even for soft robotic grippers, which is one of the most mature areas in soft robotics, the soft robotics community has so far given very little attention to formulating specifications. In this work, we discuss the importance of developing specifications during development of soft robotic systems, and present an extensive example specification for a soft gripper for pick-and-place tasks for grocery items. The proposed specification covers both functional and non-functional requirements, such as reliability, safety, adaptability, predictability, ethics, and regulations. We also highlight the need to promote verifiability as a first-class objective in the design of a soft gripper.
AERoS: Assurance of Emergent Behaviour in Autonomous Robotic Swarms
Feb 20, 2023The behaviours of a swarm are not explicitly engineered. Instead, they are an emergent consequence of the interactions of individual agents with each other and their environment. This emergent functionality poses a challenge to safety assurance. The main contribution of this paper is a process for the safety assurance of emergent behaviour in autonomous robotic swarms called AERoS, following the guidance on the Assurance of Machine Learning for use in Autonomous Systems (AMLAS). We explore our proposed process using a case study centred on a robot swarm operating a public cloakroom.
On Specifying for Trustworthiness
Jun 22, 2022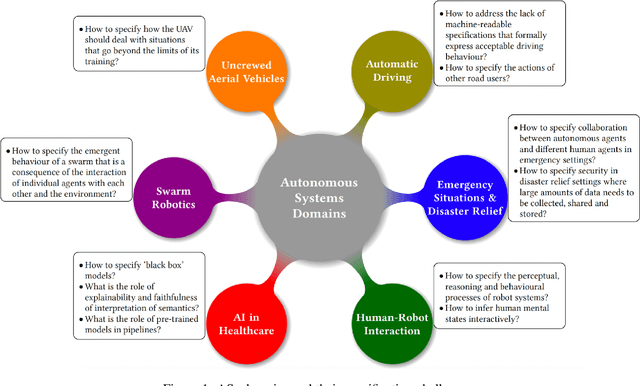

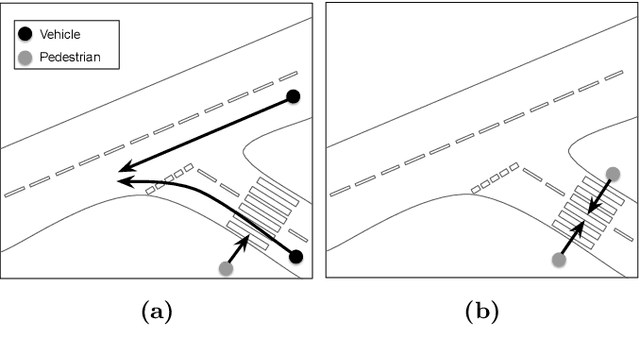
As autonomous systems are becoming part of our daily lives, ensuring their trustworthiness is crucial. There are a number of techniques for demonstrating trustworthiness. Common to all these techniques is the need to articulate specifications. In this paper, we take a broad view of specification, concentrating on top-level requirements including but not limited to functionality, safety, security and other non-functional properties. The main contribution of this article is a set of high-level intellectual challenges for the autonomous systems community related to specifying for trustworthiness. We also describe unique specification challenges concerning a number of application domains for autonomous systems.
On Determinism of Game Engines used for Simulation-based Autonomous Vehicle Verification
Apr 29, 2021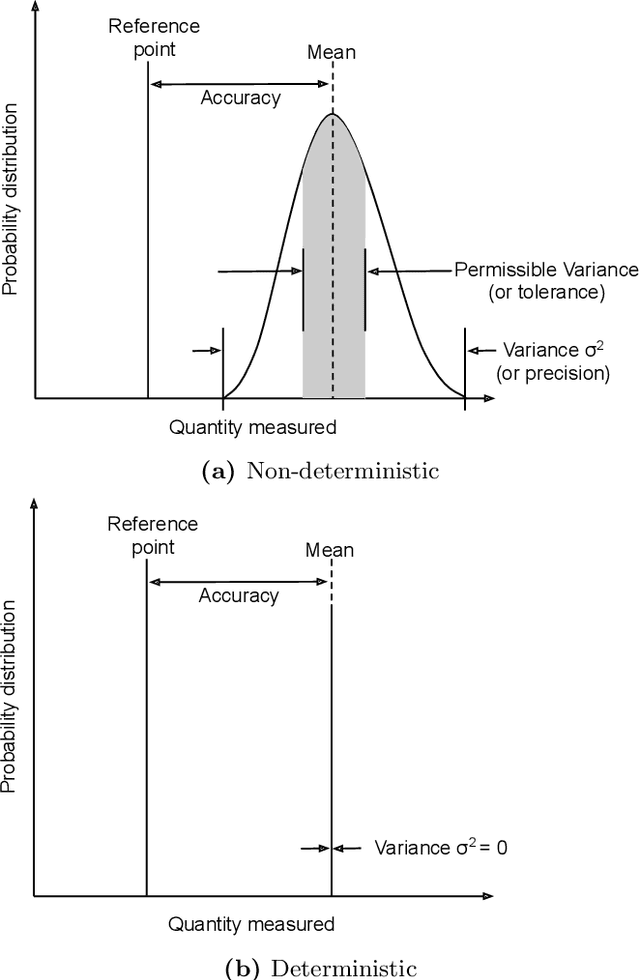
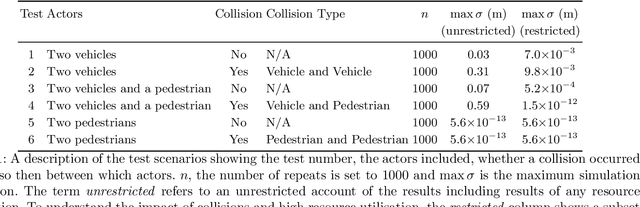
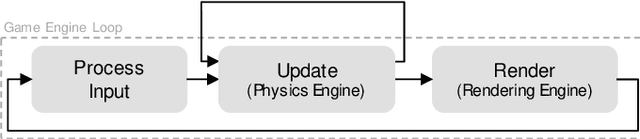
Game engines are increasingly used as simulation platforms by the autonomous vehicle (AV) community to develop vehicle control systems and test environments. A key requirement for simulation-based development and verification is determinism, since a deterministic process will always produce the same output given the same initial conditions and event history. Thus, in a deterministic simulation environment, tests are rendered repeatable and yield simulation results that are trustworthy and straightforward to debug. However, game engines are seldom deterministic. This paper reviews and identifies the potential causes of non-deterministic behaviours in game engines. A case study using CARLA, an open-source autonomous driving simulation environment powered by Unreal Engine, is presented to highlight its inherent shortcomings in providing sufficient precision in experimental results. Different configurations and utilisations of the software and hardware are explored to determine an operational domain where the simulation precision is sufficiently low i.e.\ variance between repeated executions becomes negligible for development and testing work. Finally, a method of a general nature is proposed, that can be used to find the domains of permissible variance in game engine simulations for any given system configuration.
CyRes -- Avoiding Catastrophic Failure in Connected and Autonomous Vehicles (Extended Abstract)
Jul 03, 2020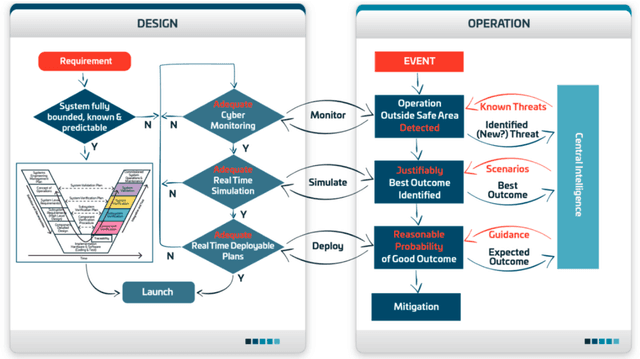
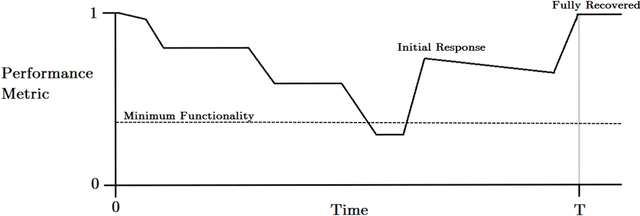
Existing approaches to cyber security and regulation in the automotive sector cannot achieve the quality of outcome necessary to ensure the safe mass deployment of advanced vehicle technologies and smart mobility systems. Without sustainable resilience hard-fought public trust will evaporate, derailing emerging global initiatives to improve the efficiency, safety and environmental impact of future transport. This paper introduces an operational cyber resilience methodology, CyRes, that is suitable for standardisation. The CyRes methodology itself is capable of being tested in court or by publicly appointed regulators. It is designed so that operators understand what evidence should be produced by it and are able to measure the quality of that evidence. The evidence produced is capable of being tested in court or by publicly appointed regulators. Thus, the real-world system to which the CyRes methodology has been applied is capable of operating at all times and in all places with a legally and socially acceptable value of negative consequence.