 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Gripping: Specifying for Trustworthiness
Jul 03, 2023


Soft robotics is an emerging technology in which engineers create flexible devices for use in a variety of applications. In order to advance the wide adoption of soft robots, ensuring their trustworthiness is essential; if soft robots are not trusted, they will not be used to their full potential. In order to demonstrate trustworthiness, a specification needs to be formulated to define what is trustworthy. However, even for soft robotic grippers, which is one of the most mature areas in soft robotics, the soft robotics community has so far given very little attention to formulating specifications. In this work, we discuss the importance of developing specifications during development of soft robotic systems, and present an extensive example specification for a soft gripper for pick-and-place tasks for grocery items. The proposed specification covers both functional and non-functional requirements, such as reliability, safety, adaptability, predictability, ethics, and regulations. We also highlight the need to promote verifiability as a first-class objective in the design of a soft gripper.
A Methodology for Approaching the Integration of Complex Robotics Systems Illustrated through a Bi-manual Manipulation Case-Study
Mar 18, 2021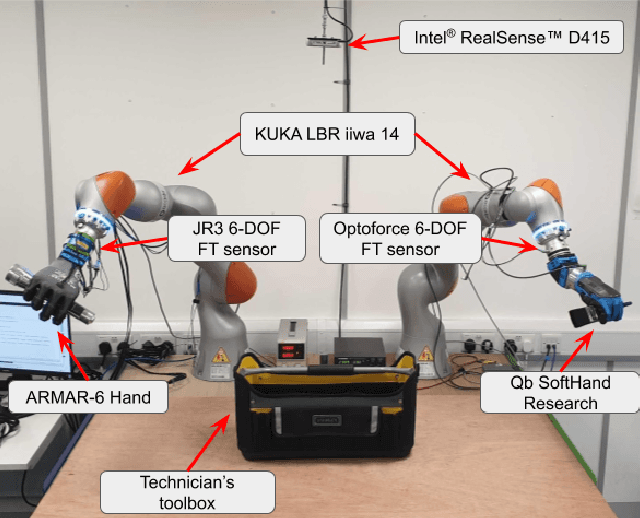

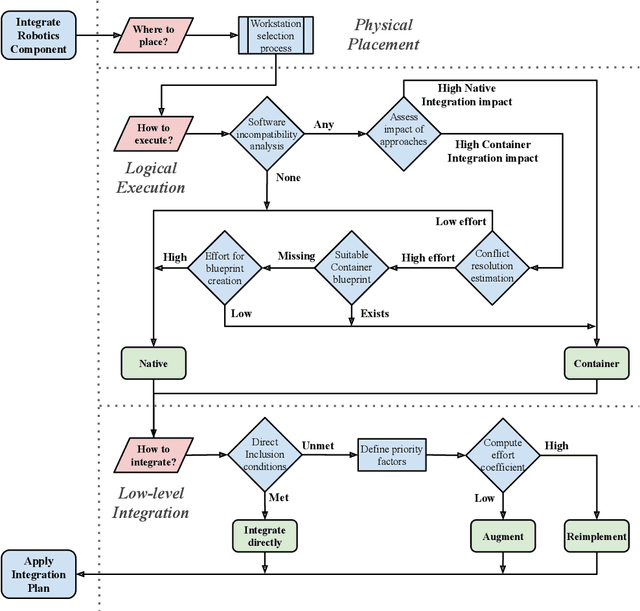
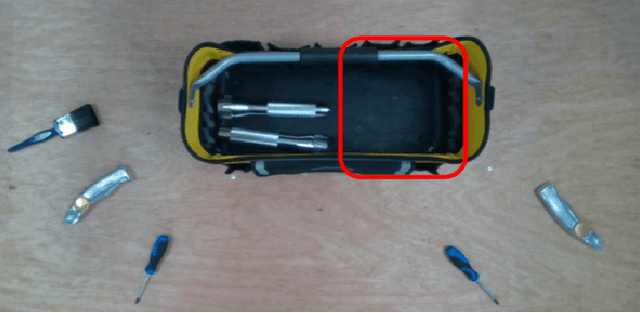
The multidisciplinarity of robotics creates a need for robust integration methodologies that can facilitate the adoption of state-of-the-art research components in an industrial application. Unfortunately, there are no clear, community accepted guidelines or standards that define the integration of such components in a single robotic system. In this paper, we propose a methodology that assesses the software components of a candidate system on the basis of the effort required to integrate them and the impact their integration will have on a target system. We demonstrate how this methodology can be applied using an industrial tool packing system as an example. The system integrates a wide range of both in-house and third-party research outputs and software components. We prove the effectiveness of our approach by evaluating system performance with an experimental benchmark that assesses the robustness, reliability and operational speed of the system for the given packing task. We also demonstrate how our methodology can be used to predict the amount of integration time required for a component. The proposed integration methodology can be applied to any robotic system to facilitate its transition from the research to an industrial environment.
Polyhedral Friction Cone Estimator for Object Manipulation
Nov 26, 2020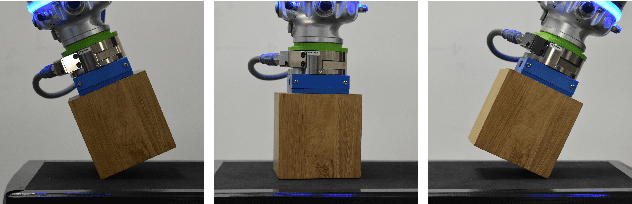
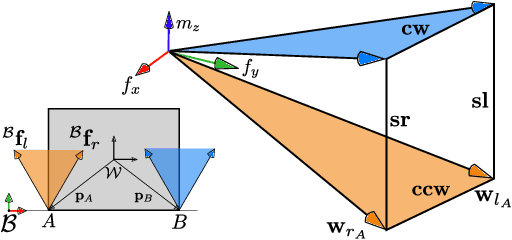
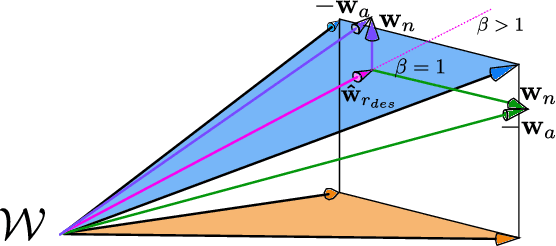
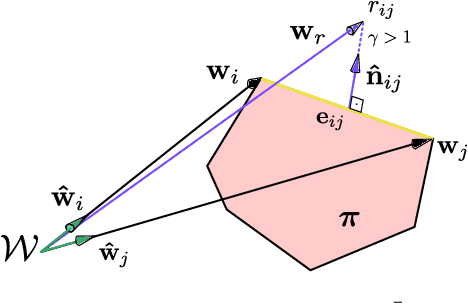
A polyhedral friction cone is a set of reaction wrenches that an object can experience whilst in contact with its environment. This polyhedron is a powerful tool to control an object's motion and interaction with the environment. It can be derived analytically, upon knowledge of object and environment geometries, contact point locations and friction coefficients. We propose to estimate the polyhedral friction cone so that a priori knowledge of these quantities is no longer required. Additionally, we introduce a solution to transform the estimated friction cone to avoid re-estimation while the object moves. We present an analysis of the estimated polyhedral friction cone and demonstrate its application for manipulating an object in simulation and with a real robot.