 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Robotic Technological Probe for Speculative Fashion Futures
Dec 29, 2025Emerging wearable robotics demand design approaches that address not only function, but also social meaning. In response, we present Sumbrella, a soft robotic garment developed as a speculative fashion probe. We first detail the design and fabrication of the Sumbrella, including sequenced origami-inspired bistable units, fabric pneumatic actuation chambers, cable driven shape morphing mechanisms, computer vision components, and an integrated wearable system comprising a hat and bolero jacket housing power and control electronics. Through a focus group with twelve creative technologists, we then used Sumbrella as a technological probe to explore how people interpreted, interacted, and imagined future relationships with soft robotic wearables. While Sumbrella allowed our participants to engage in rich discussion around speculative futures and expressive potential, it also surfaced concerns about exploitation, surveillance, and the personal risks and societal ethics of embedding biosensing technologies in public life. We contribute to the Human-Robot Interaction (HRI) field key considerations and recommendations for designing soft robotic garments, including the potential for kinesic communication, the impact of such technologies on social dynamics, and the importance of ethical guidelines. Finally, we provide a reflection on our application of speculative design; proposing that it allows HRI researchers to not only consider functionality, but also how wearable robots influence definitions of what is considered acceptable or desirable in public settings.
Soft Gripping: Specifying for Trustworthiness
Jul 03, 2023


Soft robotics is an emerging technology in which engineers create flexible devices for use in a variety of applications. In order to advance the wide adoption of soft robots, ensuring their trustworthiness is essential; if soft robots are not trusted, they will not be used to their full potential. In order to demonstrate trustworthiness, a specification needs to be formulated to define what is trustworthy. However, even for soft robotic grippers, which is one of the most mature areas in soft robotics, the soft robotics community has so far given very little attention to formulating specifications. In this work, we discuss the importance of developing specifications during development of soft robotic systems, and present an extensive example specification for a soft gripper for pick-and-place tasks for grocery items. The proposed specification covers both functional and non-functional requirements, such as reliability, safety, adaptability, predictability, ethics, and regulations. We also highlight the need to promote verifiability as a first-class objective in the design of a soft gripper.
Bodily aware soft robots: integration of proprioceptive and exteroceptive sensors
Nov 08, 2017
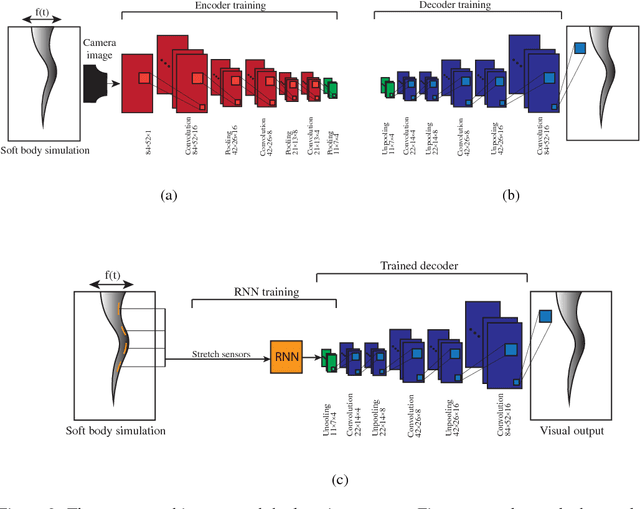
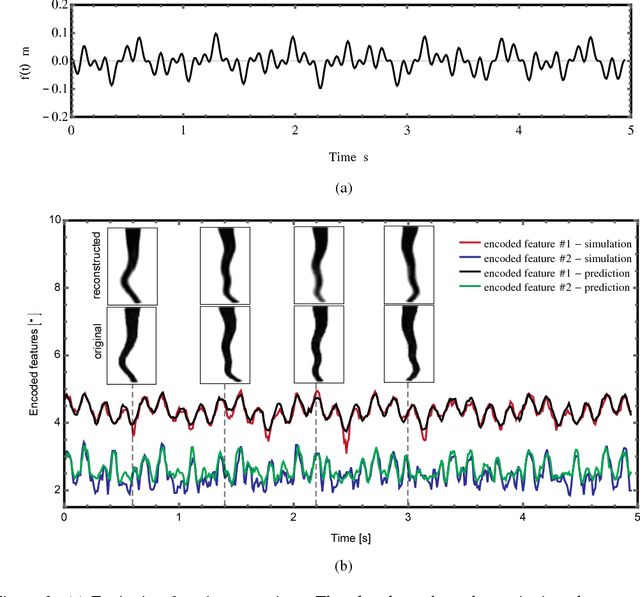
Being aware of our body has great importance in our everyday life. This is the reason why we know how to move in a dark room or to grasp a complex object. These skills are important for robots as well, however, robotic bodily awareness is still an unsolved problem. In this paper we present a novel method to implement bodily awareness in soft robots by the integration of exteroceptive and proprioceptive sensors. We use a combination of a stacked convolutional autoencoder and a recurrent neural network to map internal sensory signals to visual information. As a result, the simulated soft robot can learn to \textit{imagine} its motion even when its visual sensor is not available.