Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBodily aware soft robots: integration of proprioceptive and exteroceptive sensors
Nov 08, 2017
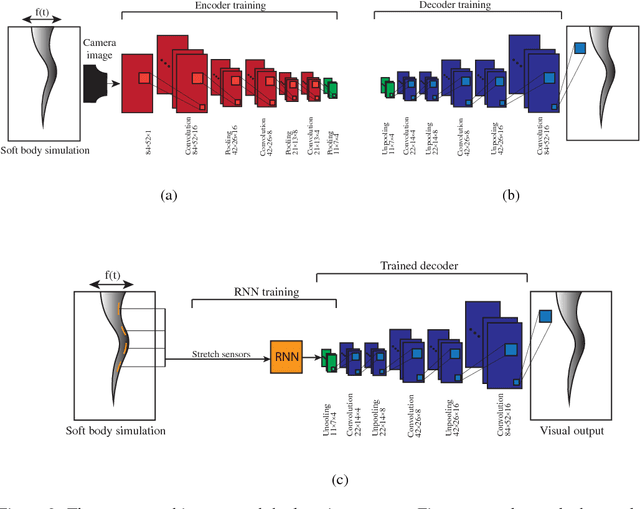
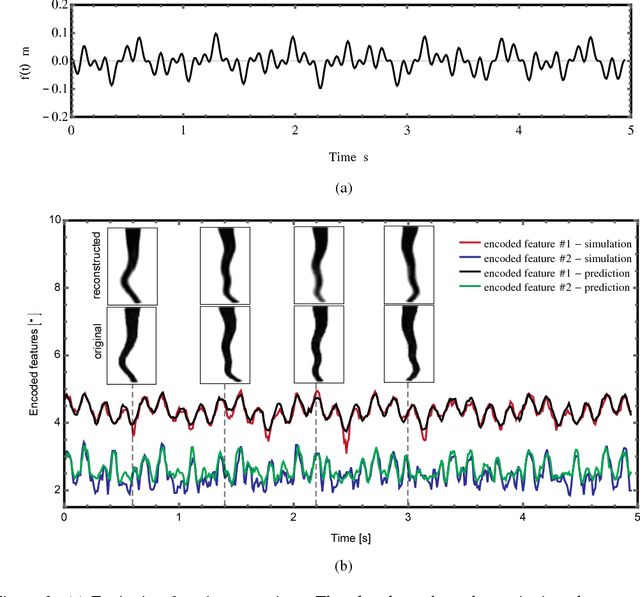
Being aware of our body has great importance in our everyday life. This is the reason why we know how to move in a dark room or to grasp a complex object. These skills are important for robots as well, however, robotic bodily awareness is still an unsolved problem. In this paper we present a novel method to implement bodily awareness in soft robots by the integration of exteroceptive and proprioceptive sensors. We use a combination of a stacked convolutional autoencoder and a recurrent neural network to map internal sensory signals to visual information. As a result, the simulated soft robot can learn to \textit{imagine} its motion even when its visual sensor is not available.
Via