 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Gripping: Specifying for Trustworthiness
Jul 03, 2023


Soft robotics is an emerging technology in which engineers create flexible devices for use in a variety of applications. In order to advance the wide adoption of soft robots, ensuring their trustworthiness is essential; if soft robots are not trusted, they will not be used to their full potential. In order to demonstrate trustworthiness, a specification needs to be formulated to define what is trustworthy. However, even for soft robotic grippers, which is one of the most mature areas in soft robotics, the soft robotics community has so far given very little attention to formulating specifications. In this work, we discuss the importance of developing specifications during development of soft robotic systems, and present an extensive example specification for a soft gripper for pick-and-place tasks for grocery items. The proposed specification covers both functional and non-functional requirements, such as reliability, safety, adaptability, predictability, ethics, and regulations. We also highlight the need to promote verifiability as a first-class objective in the design of a soft gripper.
AERoS: Assurance of Emergent Behaviour in Autonomous Robotic Swarms
Feb 20, 2023The behaviours of a swarm are not explicitly engineered. Instead, they are an emergent consequence of the interactions of individual agents with each other and their environment. This emergent functionality poses a challenge to safety assurance. The main contribution of this paper is a process for the safety assurance of emergent behaviour in autonomous robotic swarms called AERoS, following the guidance on the Assurance of Machine Learning for use in Autonomous Systems (AMLAS). We explore our proposed process using a case study centred on a robot swarm operating a public cloakroom.
On Specifying for Trustworthiness
Jun 22, 2022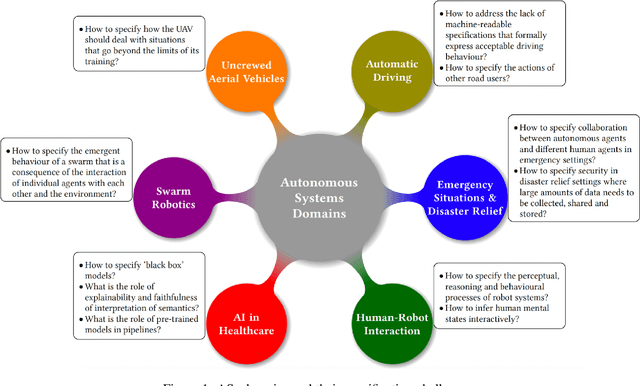

As autonomous systems are becoming part of our daily lives, ensuring their trustworthiness is crucial. There are a number of techniques for demonstrating trustworthiness. Common to all these techniques is the need to articulate specifications. In this paper, we take a broad view of specification, concentrating on top-level requirements including but not limited to functionality, safety, security and other non-functional properties. The main contribution of this article is a set of high-level intellectual challenges for the autonomous systems community related to specifying for trustworthiness. We also describe unique specification challenges concerning a number of application domains for autonomous systems.