 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetrive: Imitation Learning with Transformer Detection for End-to-End Autonomous Driving
Oct 22, 2023



This Paper proposes a novel Transformer-based end-to-end autonomous driving model named Detrive. This model solves the problem that the past end-to-end models cannot detect the position and size of traffic participants. Detrive uses an end-to-end transformer based detection model as its perception module; a multi-layer perceptron as its feature fusion network; a recurrent neural network with gate recurrent unit for path planning; and two controllers for the vehicle's forward speed and turning angle. The model is trained with an on-line imitation learning method. In order to obtain a better training set, a reinforcement learning agent that can directly obtain a ground truth bird's-eye view map from the Carla simulator as a perceptual output, is used as teacher for the imitation learning. The trained model is tested on the Carla's autonomous driving benchmark. The results show that the Transformer detector based end-to-end model has obvious advantages in dynamic obstacle avoidance compared with the traditional classifier based end-to-end model.
On Determinism of Game Engines used for Simulation-based Autonomous Vehicle Verification
Apr 29, 2021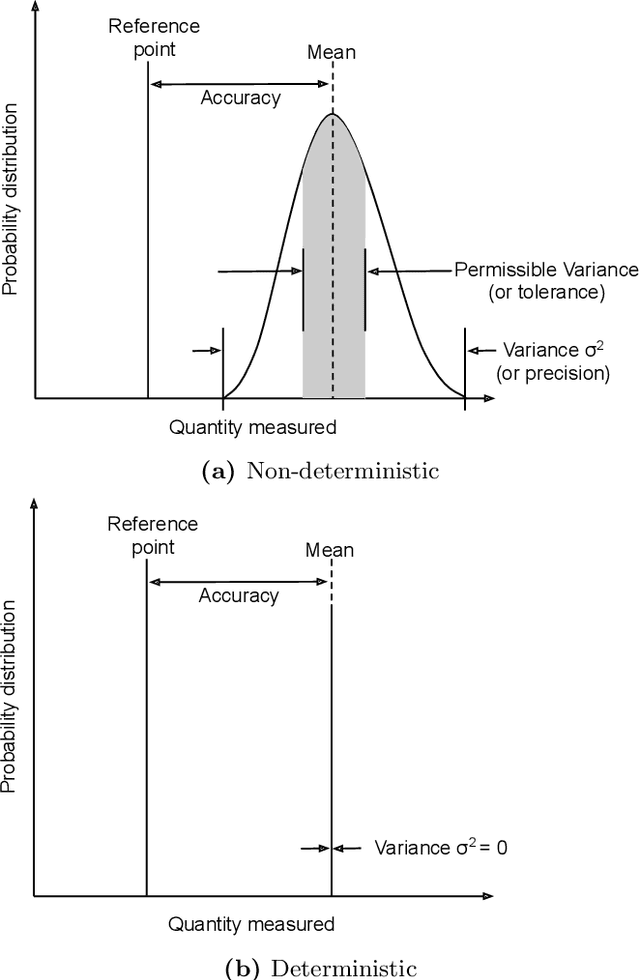
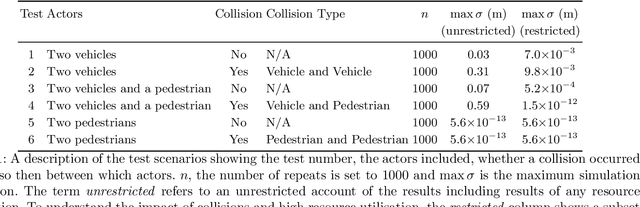
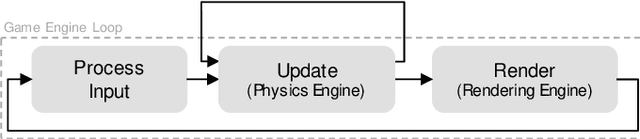
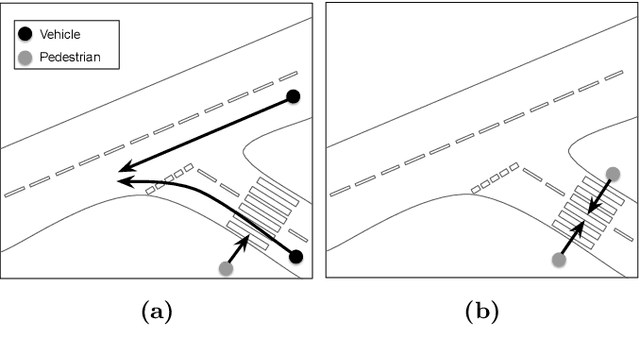
Game engines are increasingly used as simulation platforms by the autonomous vehicle (AV) community to develop vehicle control systems and test environments. A key requirement for simulation-based development and verification is determinism, since a deterministic process will always produce the same output given the same initial conditions and event history. Thus, in a deterministic simulation environment, tests are rendered repeatable and yield simulation results that are trustworthy and straightforward to debug. However, game engines are seldom deterministic. This paper reviews and identifies the potential causes of non-deterministic behaviours in game engines. A case study using CARLA, an open-source autonomous driving simulation environment powered by Unreal Engine, is presented to highlight its inherent shortcomings in providing sufficient precision in experimental results. Different configurations and utilisations of the software and hardware are explored to determine an operational domain where the simulation precision is sufficiently low i.e.\ variance between repeated executions becomes negligible for development and testing work. Finally, a method of a general nature is proposed, that can be used to find the domains of permissible variance in game engine simulations for any given system configuration.
Model-Based Testing, Using Belief-Desire-Intentions Agents, of Control Code for Robots in Collaborative Human-Robot Interactions
Mar 02, 2016
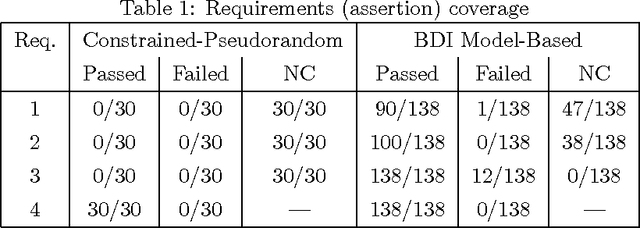
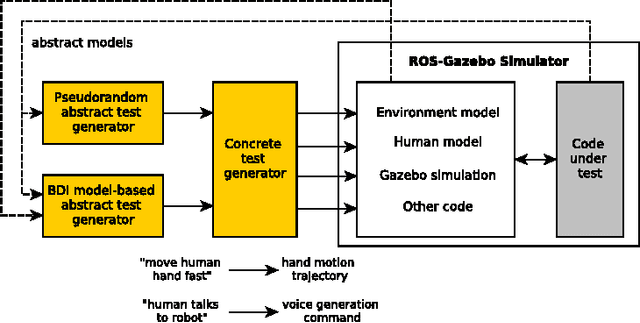
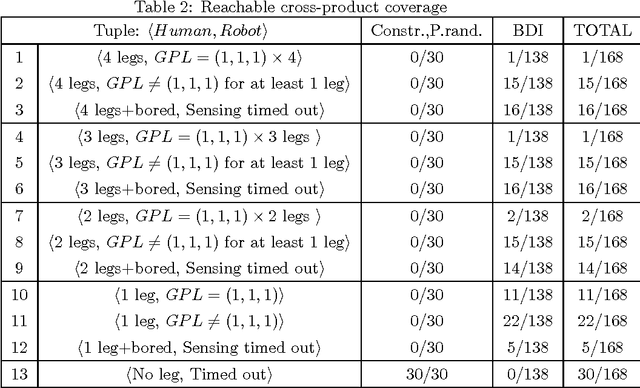
The software of robotic assistants needs to be verified, to ensure its safety and functional correctness. Testing in simulation allows a high degree of realism in the verification. However, generating tests that cover both interesting foreseen and unforeseen scenarios in human-robot interaction (HRI) tasks, while executing most of the code, remains a challenge. We propose the use of belief-desire-intention (BDI) agents in the test environment, to increase the level of realism and human-like stimulation of simulated robots. Artificial intelligence, such as agent theory, can be exploited for more intelligent test generation. An automated testbench was implemented for a simulation in Robot Operating System (ROS) and Gazebo, of a cooperative table assembly task between a humanoid robot and a person. Requirements were verified for this task, and some unexpected design issues were discovered, leading to possible code improvements. Our results highlight the practicality of BDI agents to automatically generate valid and human-like tests to get high code coverage, compared to hand-written directed tests, pseudorandom generation, and other variants of model-based test generation. Also, BDI agents allow the coverage of combined behaviours of the HRI system with more ease than writing temporal logic properties for model checking.