 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderstandable Controller Extraction from Video Observations of Swarms
Paper and Code
Sep 02, 2022

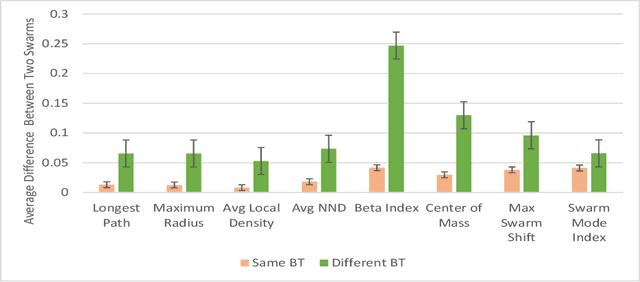
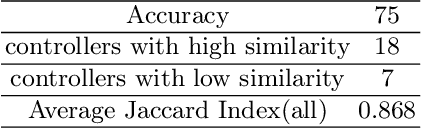
Swarm behavior emerges from the local interaction of agents and their environment often encoded as simple rules. Extracting the rules by watching a video of the overall swarm behavior could help us study and control swarm behavior in nature, or artificial swarms that have been designed by external actors. It could also serve as a new source of inspiration for swarm robotics. Yet extracting such rules is challenging as there is often no visible link between the emergent properties of the swarm and their local interactions. To this end, we develop a method to automatically extract understandable swarm controllers from video demonstrations. The method uses evolutionary algorithms driven by a fitness function that compares eight high-level swarm metrics. The method is able to extract many controllers (behavior trees) in a simple collective movement task. We then provide a qualitative analysis of behaviors that resulted in different trees, but similar behaviors. This provides the first steps toward automatic extraction of swarm controllers based on observations.