 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePseudo-Random UAV Test Generation Using Low-Fidelity Path Simulator
Mar 31, 2025Simulation-based testing provides a safe and cost-effective environment for verifying the safety of Uncrewed Aerial Vehicles (UAVs). However, simulation can be resource-consuming, especially when High-Fidelity Simulators (HFS) are used. To optimise simulation resources, we propose a pseudo-random test generator that uses a Low-Fidelity Simulator (LFS) to estimate UAV flight paths. This work simplifies the PX4 autopilot HFS to develop a LFS, which operates one order of magnitude faster than the HFS.Test cases predicted to cause safety violations in the LFS are subsequently validated using the HFS.
On the Design of Human-Robot Collaboration Gestures
Feb 29, 2024
Effective communication between humans and collaborative robots is essential for seamless Human-Robot Collaboration (HRC). In noisy industrial settings, nonverbal communication, such as gestures, plays a key role in conveying commands and information to robots efficiently. While existing literature has thoroughly examined gesture recognition and robots' responses to these gestures, there is a notable gap in exploring the design of these gestures. The criteria for creating efficient HRC gestures are scattered across numerous studies. This paper surveys the design principles of HRC gestures, as contained in the literature, aiming to consolidate a set of criteria for HRC gesture design. It also examines the methods used for designing and evaluating HRC gestures to highlight research gaps and present directions for future research in this area.
D-VAL: An automatic functional equivalence validation tool for planning domain models
Apr 29, 2021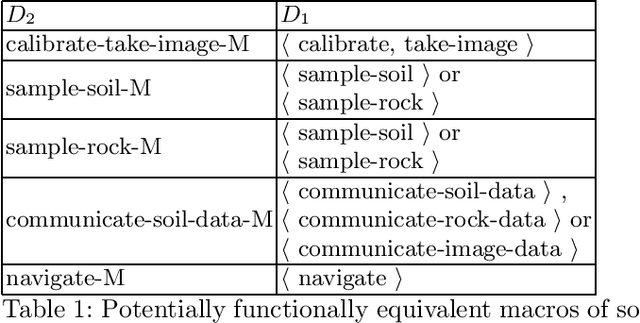
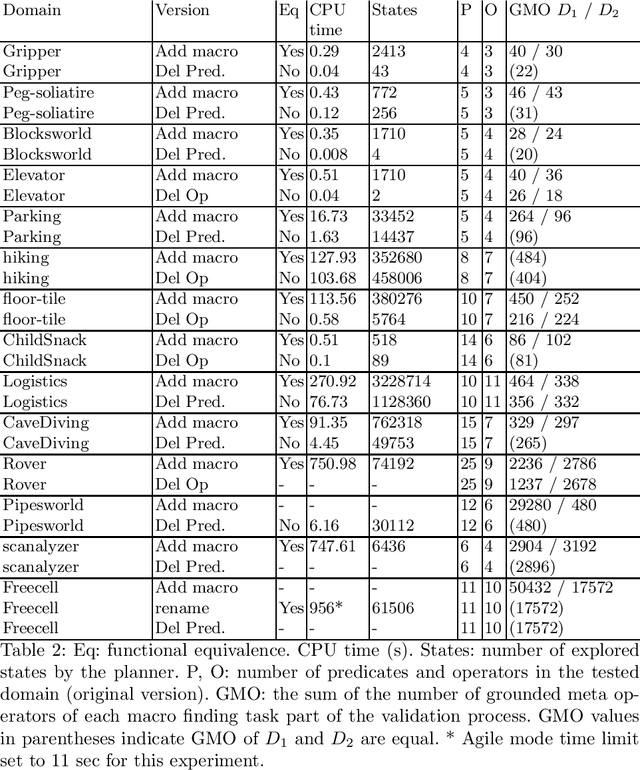
In this paper, we introduce an approach to validate the functional equivalence of planning domain models. Validating the functional equivalence of planning domain models is the problem of formally confirming that two planning domain models can be used to solve the same set of problems. The need for techniques to validate the functional equivalence of planning domain models has been highlighted in previous research and has applications in model learning, development and extension. We prove the soundness and completeness of our method. We also develop D-VAL, an automatic functional equivalence validation tool for planning domain models. Empirical evaluation shows that D-VAL validates the functional equivalence of most examined domains in less than five minutes. Additionally, we provide a benchmark to evaluate the feasibility and scalability of this and future related work.
Verification of Planning Domain Models - Revisited
Nov 22, 2018
The verification of planning domain models is crucial to ensure the safety, integrity and correctness of planning-based automated systems. This task is usually performed using model checking techniques. However, directly applying model checkers to verify planning domain models can result in false positives, i.e. counterexamples that are unreachable by a sound planner when using the domain under verification during a planning task. In this paper, we discuss the downside of unconstrained planning domain model verification. We then propose a fail-safe practice for designing planning domain models that can inherently guarantee the safety of the produced plans in case of undetected errors in domain models. In addition, we demonstrate how model checkers, as well as state trajectory constraints planning techniques, should be used to verify planning domain models so that unreachable counterexamples are not returned.