 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeManifold Random Features
Feb 03, 2026We present a new paradigm for creating random features to approximate bi-variate functions (in particular, kernels) defined on general manifolds. This new mechanism of Manifold Random Features (MRFs) leverages discretization of the manifold and the recently introduced technique of Graph Random Features (GRFs) to learn continuous fields on manifolds. Those fields are used to find continuous approximation mechanisms that otherwise, in general scenarios, cannot be derived analytically. MRFs provide positive and bounded features, a key property for accurate, low-variance approximation. We show deep asymptotic connection between GRFs, defined on discrete graph objects, and continuous random features used for regular kernels. As a by-product of our method, we re-discover recently introduced mechanism of Gaussian kernel approximation applied in particular to improve linear-attention Transformers, considering simple random walks on graphs and by-passing original complex mathematical computations. We complement our algorithm with a rigorous theoretical analysis and verify in thorough experimental studies.
Understanding a Robot's Guiding Ethical Principles via Automatically Generated Explanations
Jun 20, 2022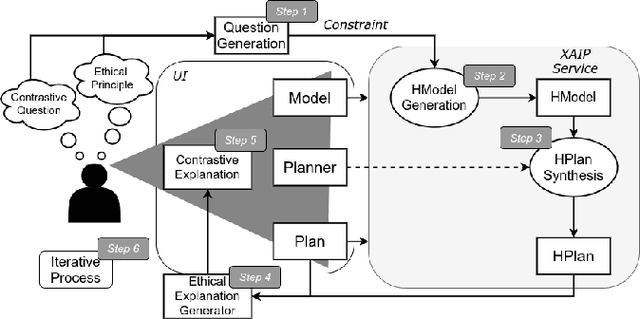
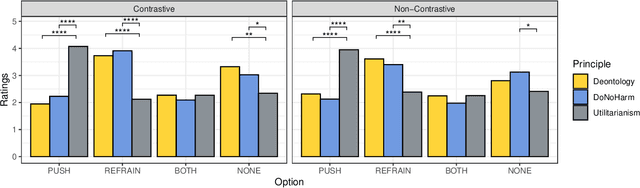
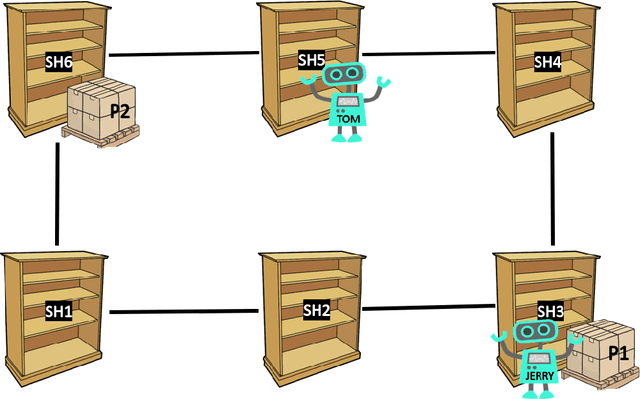
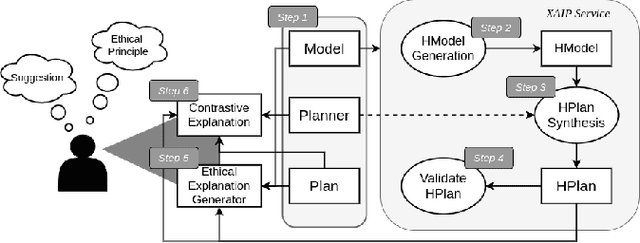
The continued development of robots has enabled their wider usage in human surroundings. Robots are more trusted to make increasingly important decisions with potentially critical outcomes. Therefore, it is essential to consider the ethical principles under which robots operate. In this paper we examine how contrastive and non-contrastive explanations can be used in understanding the ethics of robot action plans. We build upon an existing ethical framework to allow users to make suggestions about plans and receive automatically generated contrastive explanations. Results of a user study indicate that the generated explanations help humans to understand the ethical principles that underlie a robot's plan.
Non-invasive hemodynamic analysis for aortic regurgitation using computational fluid dynamics and deep learning
Nov 23, 2021
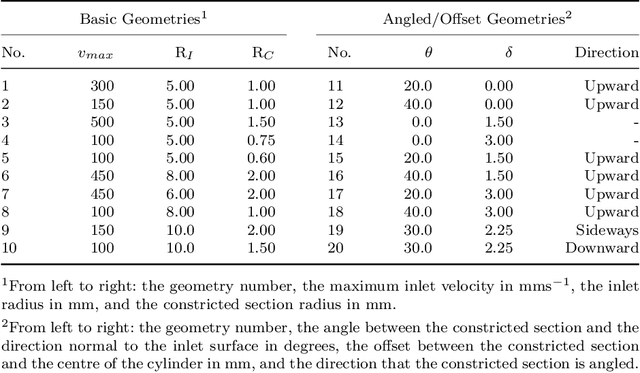
Changes in cardiovascular hemodynamics are closely related to the development of aortic regurgitation (AR), a type of valvular heart disease. Pressure gradients derived from blood flows are used to indicate AR onset and evaluate its severity. These metrics can be non-invasively obtained using four-dimensional (4D) flow magnetic resonance imaging (MRI), where accuracy is primarily dependent on spatial resolution. However, insufficient resolution often results from limitations in 4D flow MRI and complex AR hemodynamics. To address this, computational fluid dynamics simulations were transformed into synthetic 4D flow MRI data and used to train a variety of neural networks. These networks generated super resolution, full-field phase images with an upsample factor of 4. Results showed decreased velocity error, high structural similarity scores, and improved learning capabilities from previous work. Further validation was performed on two sets of in-vivo 4D flow MRI data and demonstrated success in de-noising flow images. This approach presents an opportunity to comprehensively analyse AR hemodynamics in a non-invasive manner.
Long-Range Route-planning for Autonomous Vehicles in the Polar Oceans
Nov 20, 2021


There is an increasing demand for piloted autonomous underwater vehicles (AUVs) to operate in polar ice conditions. At present, AUVs are deployed from ships and directly human-piloted in these regions, entailing a high carbon cost and limiting the scope of operations. A key requirement for long-term autonomous missions is a long-range route planning capability that is aware of the changing ice conditions. In this paper we address the problem of automating long-range route-planning for AUVs operating in the Southern Ocean. We present the route-planning method and results showing that efficient, ice-avoiding, long-distance traverses can be planned.
Improving Search by Utilizing State Information in OPTIC Planners Compilation to LP
Jun 15, 2021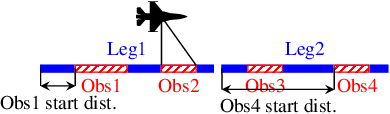
Automated planners are computer tools that allow autonomous agents to make strategies and decisions by determining a set of actions for the agent that to take, which will carry a system from a given initial state to the desired goal state. Many planners are domain-independent, allowing their deployment in a variety of domains. Such is the broad family of OPTIC planners. These planners perform Forward Search and call a Linear Programming (LP) solver multiple times at every state to check for consistency and to set bounds on the numeric variables. These checks can be computationally costly, especially in real-life applications. This paper suggests a method for identifying information about the specific state being evaluated, allowing the formulation of the equations to facilitate better solver selection and faster LP solving. The usefulness of the method is demonstrated in six domains and is shown to enhance performance significantly.
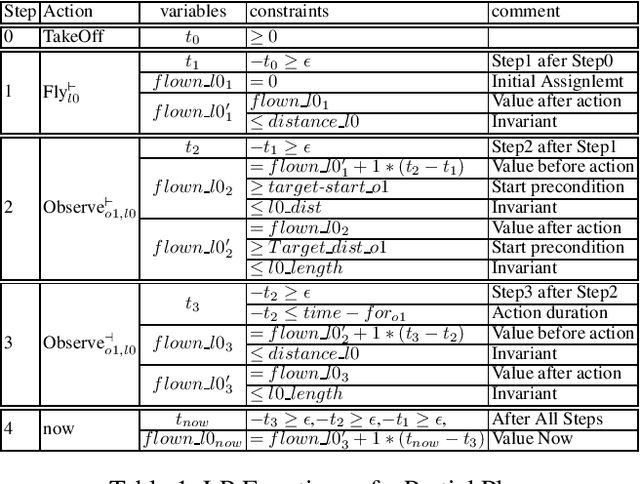
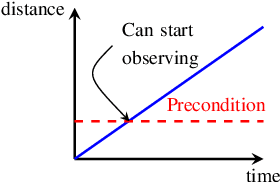
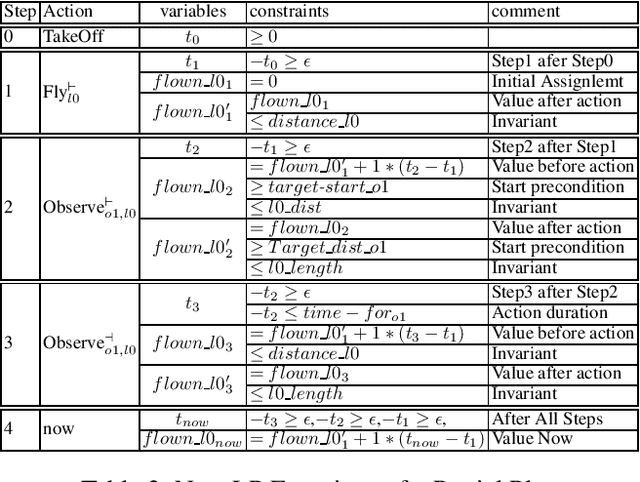
Efficient Temporal Piecewise-Linear Numeric Planning with Lazy Consistency Checking
May 21, 2021
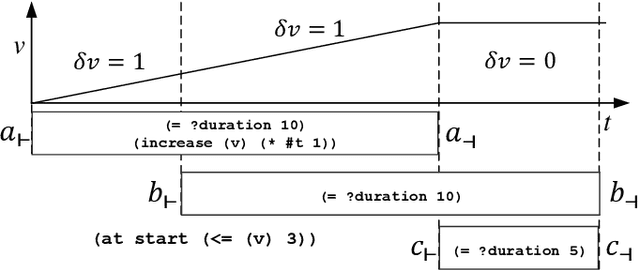
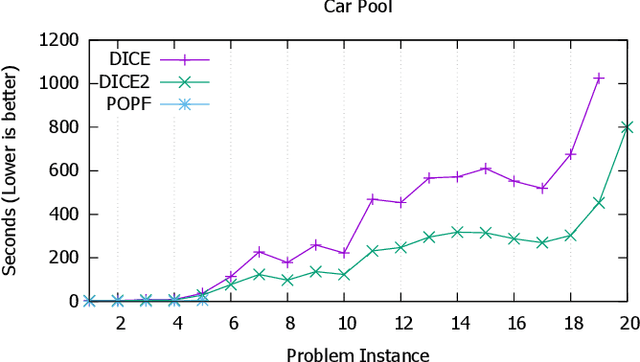
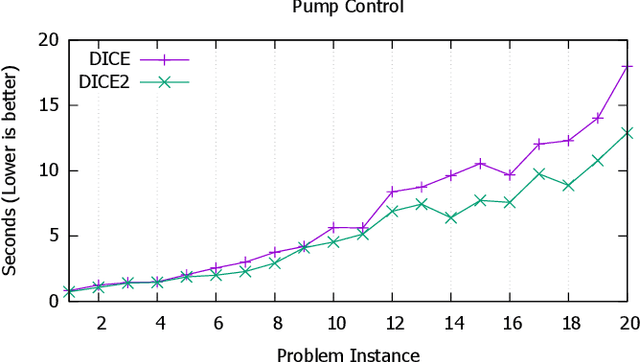
State-of-the-art temporal planners that support continuous numeric effects typically interweave search with scheduling to ensure temporal consistency. If such effects are linear, this process often makes use of Linear Programming (LP) to model the relationship between temporal constraints and conditions on numeric fluents that are subject to duration-dependent effects. While very effective on benchmark domains, this approach does not scale well when solving real-world problems that require long plans. We propose a set of techniques that allow the planner to compute LP consistency checks lazily where possible, significantly reducing the computation time required, thus allowing the planner to solve larger problem instances within an acceptable time-frame. We also propose an algorithm to perform duration-dependent goal checking more selectively. Furthermore, we propose an LP formulation with a smaller footprint that removes linearity restrictions on discrete effects applied within segments of the plan where a numeric fluent is not duration dependent. The effectiveness of these techniques is demonstrated on domains that use a mix of discrete and continuous effects, which is typical of real-world planning problems. The resultant planner is not only more efficient, but outperforms most state-of-the-art temporal-numeric and hybrid planners, in terms of both coverage and scalability.
D-VAL: An automatic functional equivalence validation tool for planning domain models
Apr 29, 2021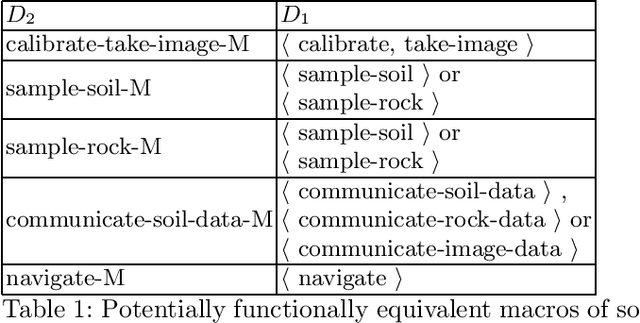
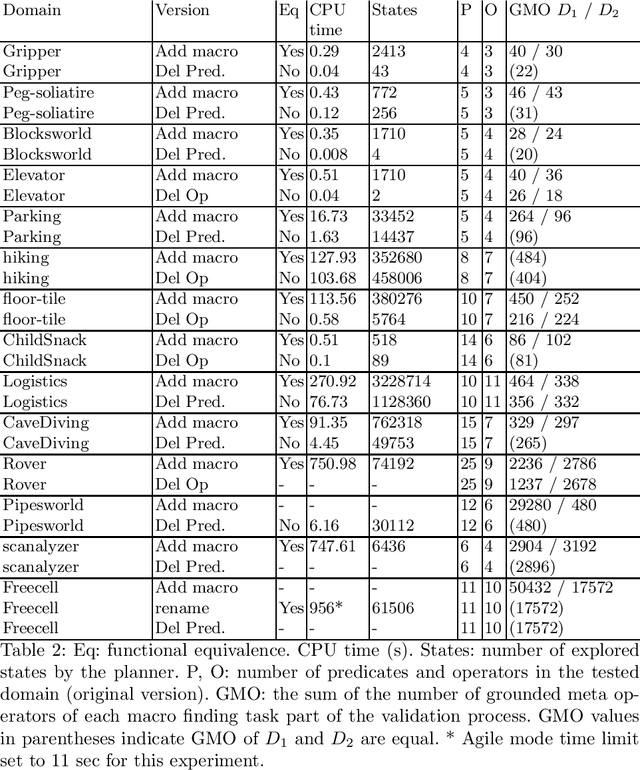
In this paper, we introduce an approach to validate the functional equivalence of planning domain models. Validating the functional equivalence of planning domain models is the problem of formally confirming that two planning domain models can be used to solve the same set of problems. The need for techniques to validate the functional equivalence of planning domain models has been highlighted in previous research and has applications in model learning, development and extension. We prove the soundness and completeness of our method. We also develop D-VAL, an automatic functional equivalence validation tool for planning domain models. Empirical evaluation shows that D-VAL validates the functional equivalence of most examined domains in less than five minutes. Additionally, we provide a benchmark to evaluate the feasibility and scalability of this and future related work.
Contrastive Explanations of Plans Through Model Restrictions
Mar 29, 2021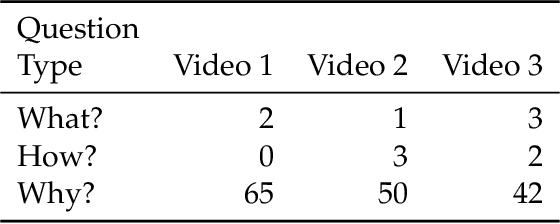
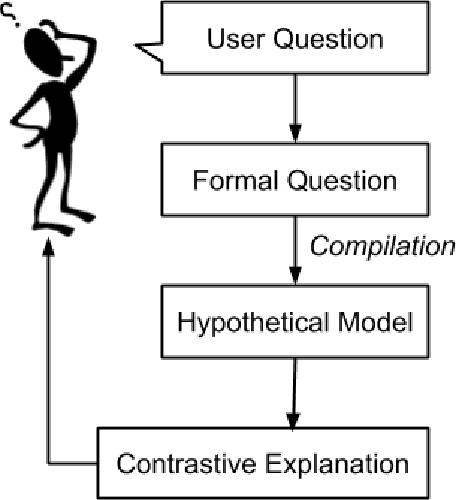
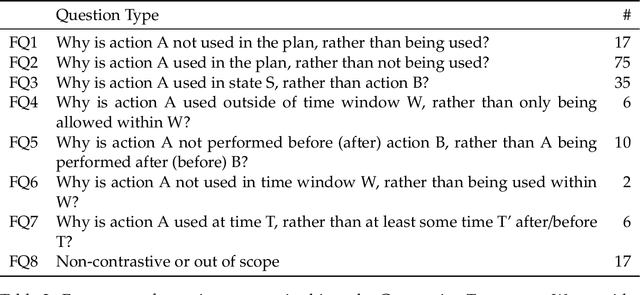
In automated planning, the need for explanations arises when there is a mismatch between a proposed plan and the user's expectation. We frame Explainable AI Planning in the context of the plan negotiation problem, in which a succession of hypothetical planning problems are generated and solved. The object of the negotiation is for the user to understand and ultimately arrive at a satisfactory plan. We present the results of a user study that demonstrates that when users ask questions about plans, those questions are contrastive, i.e. "why A rather than B?". We use the data from this study to construct a taxonomy of user questions that often arise during plan negotiation. We formally define our approach to plan negotiation through model restriction as an iterative process. This approach generates hypothetical problems and contrastive plans by restricting the model through constraints implied by user questions. We formally define model-based compilations in PDDL2.1 of each constraint derived from a user question in the taxonomy, and empirically evaluate the compilations in terms of computational complexity. The compilations were implemented as part of an explanation framework that employs iterative model restriction. We demonstrate its benefits in a second user study.
Towards Contrastive Explanations for Comparing the Ethics of Plans
Jun 22, 2020
The development of robotics and AI agents has enabled their wider usage in human surroundings. AI agents are more trusted to make increasingly important decisions with potentially critical outcomes. It is essential to consider the ethical consequences of the decisions made by these systems. In this paper, we present how contrastive explanations can be used for comparing the ethics of plans. We build upon an existing ethical framework to allow users to make suggestions to plans and receive contrastive explanations.
Explainable Planning
Sep 29, 2017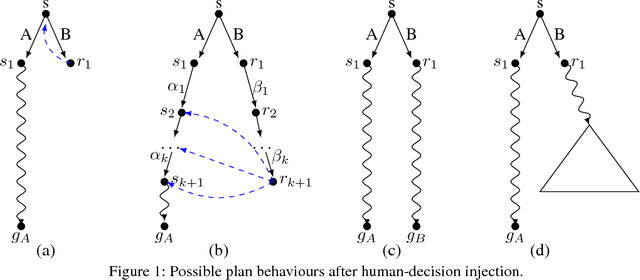
As AI is increasingly being adopted into application solutions, the challenge of supporting interaction with humans is becoming more apparent. Partly this is to support integrated working styles, in which humans and intelligent systems cooperate in problem-solving, but also it is a necessary step in the process of building trust as humans migrate greater responsibility to such systems. The challenge is to find effective ways to communicate the foundations of AI-driven behaviour, when the algorithms that drive it are far from transparent to humans. In this paper we consider the opportunities that arise in AI planning, exploiting the model-based representations that form a familiar and common basis for communication with users, while acknowledging the gap between planning algorithms and human problem-solving.