 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSea ice detection using concurrent multispectral and synthetic aperture radar imagery
Jan 11, 2024Synthetic Aperture Radar (SAR) imagery is the primary data type used for sea ice mapping due to its spatio-temporal coverage and the ability to detect sea ice independent of cloud and lighting conditions. Automatic sea ice detection using SAR imagery remains problematic due to the presence of ambiguous signal and noise within the image. Conversely, ice and water are easily distinguishable using multispectral imagery (MSI), but in the polar regions the ocean's surface is often occluded by cloud or the sun may not appear above the horizon for many months. To address some of these limitations, this paper proposes a new tool trained using concurrent multispectral Visible and SAR imagery for sea Ice Detection (ViSual\_IceD). ViSual\_IceD is a convolution neural network (CNN) that builds on the classic U-Net architecture by containing two parallel encoder stages, enabling the fusion and concatenation of MSI and SAR imagery containing different spatial resolutions. The performance of ViSual\_IceD is compared with U-Net models trained using concatenated MSI and SAR imagery as well as models trained exclusively on MSI or SAR imagery. ViSual\_IceD outperforms the other networks, with a F1 score 1.60\% points higher than the next best network, and results indicate that ViSual\_IceD is selective in the image type it uses during image segmentation. Outputs from ViSual\_IceD are compared to sea ice concentration products derived from the AMSR2 Passive Microwave (PMW) sensor. Results highlight how ViSual\_IceD is a useful tool to use in conjunction with PMW data, particularly in coastal regions. As the spatial-temporal coverage of MSI and SAR imagery continues to increase, ViSual\_IceD provides a new opportunity for robust, accurate sea ice coverage detection in polar regions.
Long-Range Route-planning for Autonomous Vehicles in the Polar Oceans
Nov 20, 2021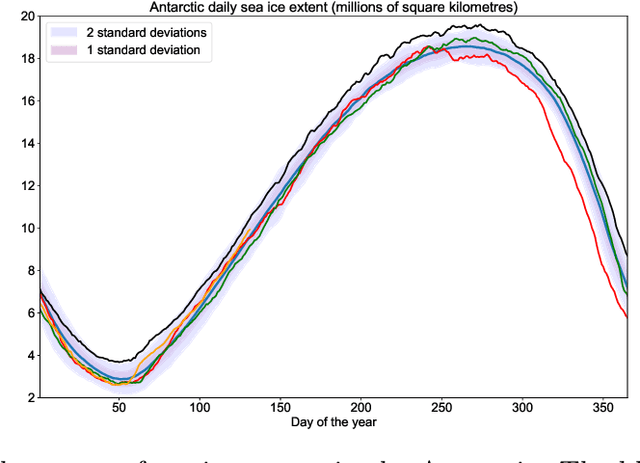

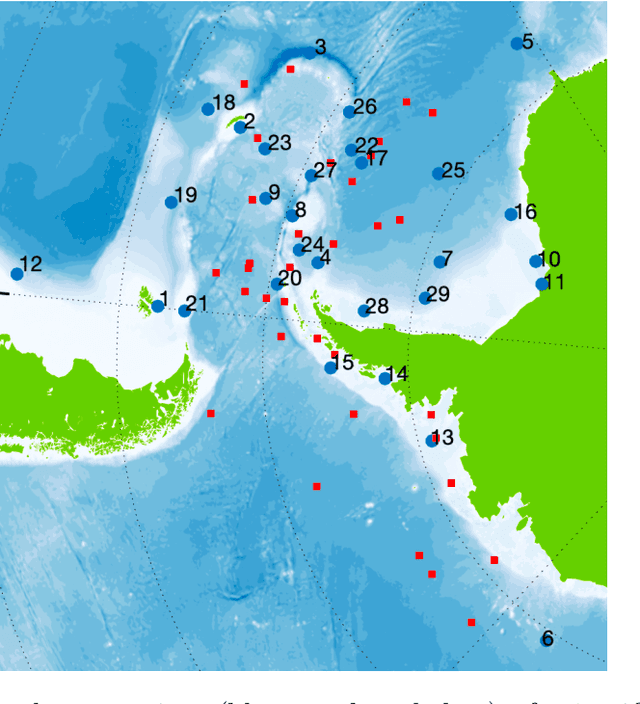

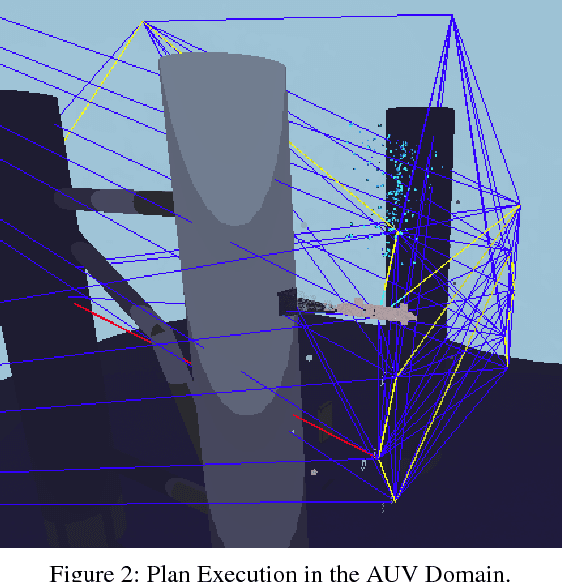
There is an increasing demand for piloted autonomous underwater vehicles (AUVs) to operate in polar ice conditions. At present, AUVs are deployed from ships and directly human-piloted in these regions, entailing a high carbon cost and limiting the scope of operations. A key requirement for long-term autonomous missions is a long-range route planning capability that is aware of the changing ice conditions. In this paper we address the problem of automating long-range route-planning for AUVs operating in the Southern Ocean. We present the route-planning method and results showing that efficient, ice-avoiding, long-distance traverses can be planned.
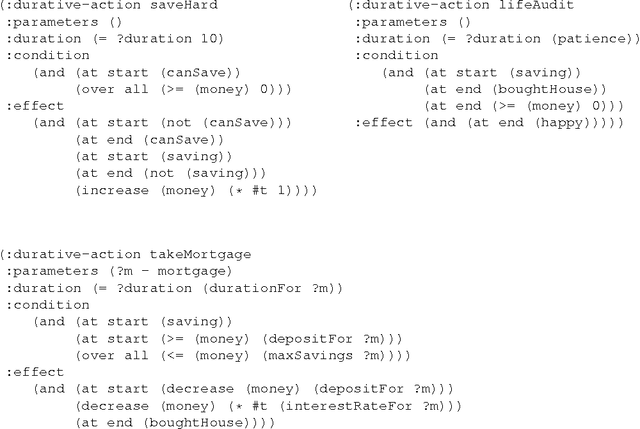
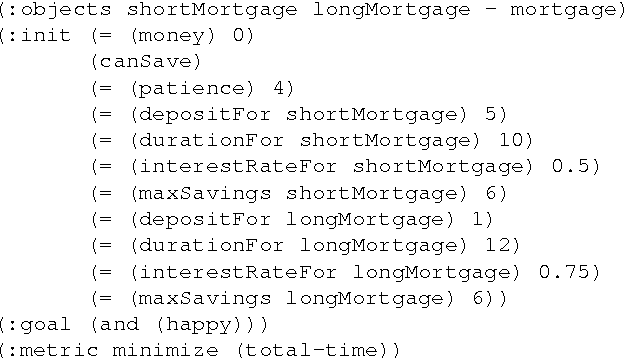
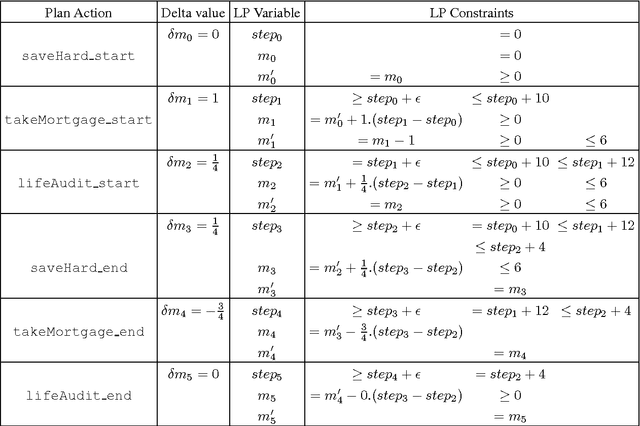
Efficient Temporal Piecewise-Linear Numeric Planning with Lazy Consistency Checking
May 21, 2021
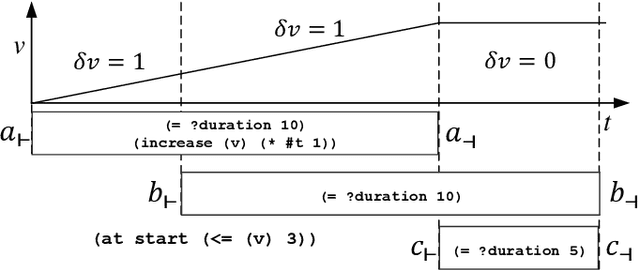
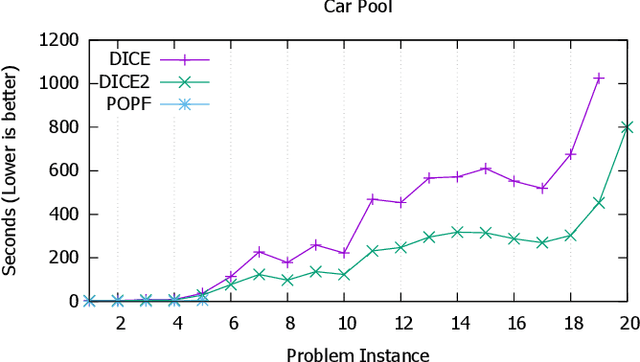
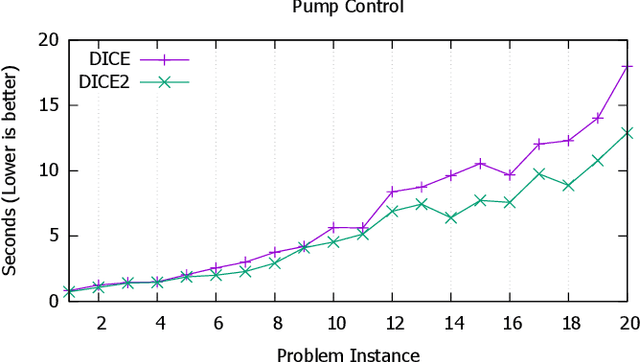
State-of-the-art temporal planners that support continuous numeric effects typically interweave search with scheduling to ensure temporal consistency. If such effects are linear, this process often makes use of Linear Programming (LP) to model the relationship between temporal constraints and conditions on numeric fluents that are subject to duration-dependent effects. While very effective on benchmark domains, this approach does not scale well when solving real-world problems that require long plans. We propose a set of techniques that allow the planner to compute LP consistency checks lazily where possible, significantly reducing the computation time required, thus allowing the planner to solve larger problem instances within an acceptable time-frame. We also propose an algorithm to perform duration-dependent goal checking more selectively. Furthermore, we propose an LP formulation with a smaller footprint that removes linearity restrictions on discrete effects applied within segments of the plan where a numeric fluent is not duration dependent. The effectiveness of these techniques is demonstrated on domains that use a mix of discrete and continuous effects, which is typical of real-world planning problems. The resultant planner is not only more efficient, but outperforms most state-of-the-art temporal-numeric and hybrid planners, in terms of both coverage and scalability.
Explainable Planning
Sep 29, 2017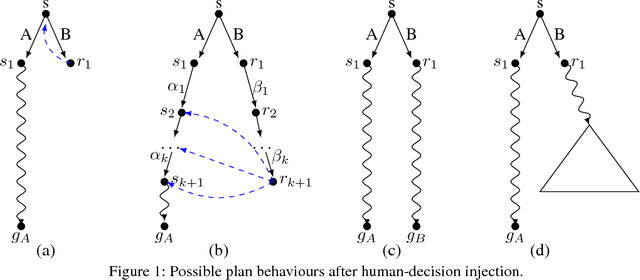
As AI is increasingly being adopted into application solutions, the challenge of supporting interaction with humans is becoming more apparent. Partly this is to support integrated working styles, in which humans and intelligent systems cooperate in problem-solving, but also it is a necessary step in the process of building trust as humans migrate greater responsibility to such systems. The challenge is to find effective ways to communicate the foundations of AI-driven behaviour, when the algorithms that drive it are far from transparent to humans. In this paper we consider the opportunities that arise in AI planning, exploiting the model-based representations that form a familiar and common basis for communication with users, while acknowledging the gap between planning algorithms and human problem-solving.
A Hybrid LP-RPG Heuristic for Modelling Numeric Resource Flows in Planning
Feb 04, 2014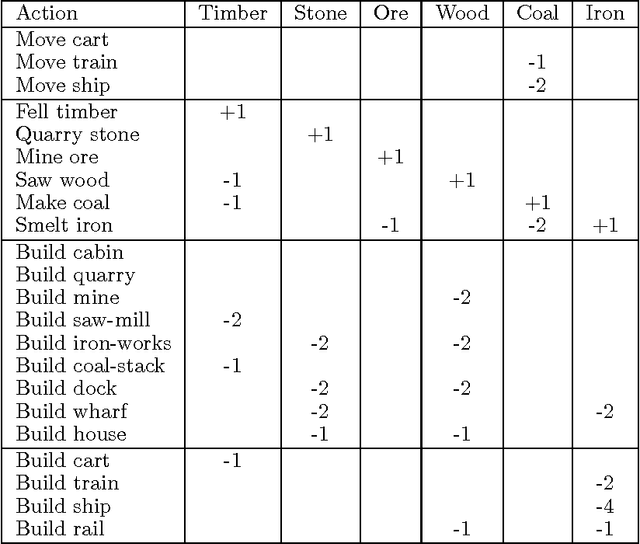
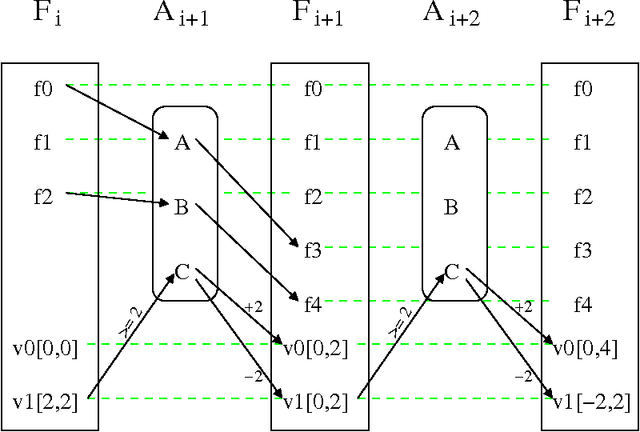
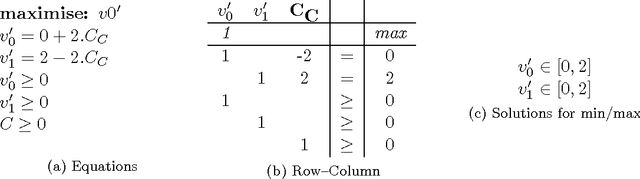
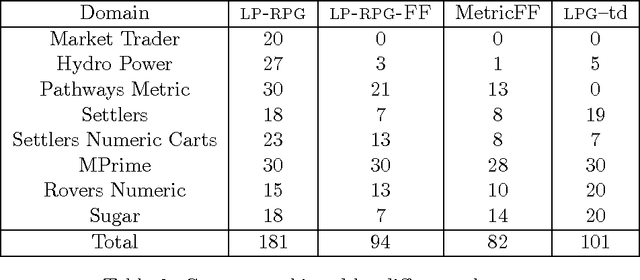
Although the use of metric fluents is fundamental to many practical planning problems, the study of heuristics to support fully automated planners working with these fluents remains relatively unexplored. The most widely used heuristic is the relaxation of metric fluents into interval-valued variables --- an idea first proposed a decade ago. Other heuristics depend on domain encodings that supply additional information about fluents, such as capacity constraints or other resource-related annotations. A particular challenge to these approaches is in handling interactions between metric fluents that represent exchange, such as the transformation of quantities of raw materials into quantities of processed goods, or trading of money for materials. The usual relaxation of metric fluents is often very poor in these situations, since it does not recognise that resources, once spent, are no longer available to be spent again. We present a heuristic for numeric planning problems building on the propositional relaxed planning graph, but using a mathematical program for numeric reasoning. We define a class of producer--consumer planning problems and demonstrate how the numeric constraints in these can be modelled in a mixed integer program (MIP). This MIP is then combined with a metric Relaxed Planning Graph (RPG) heuristic to produce an integrated hybrid heuristic. The MIP tracks resource use more accurately than the usual relaxation, but relaxes the ordering of actions, while the RPG captures the causal propositional aspects of the problem. We discuss how these two components interact to produce a single unified heuristic and go on to explore how further numeric features of planning problems can be integrated into the MIP. We show that encoding a limited subset of the propositional problem to augment the MIP can yield more accurate guidance, partly by exploiting structure such as propositional landmarks and propositional resources. Our results show that the use of this heuristic enhances scalability on problems where numeric resource interaction is key in finding a solution.
Plan-based Policies for Efficient Multiple Battery Load Management
Jan 23, 2014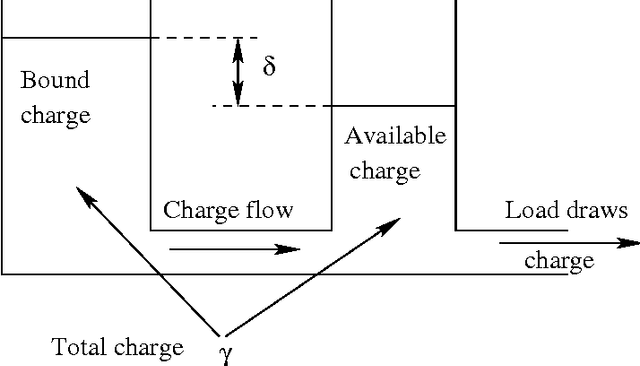
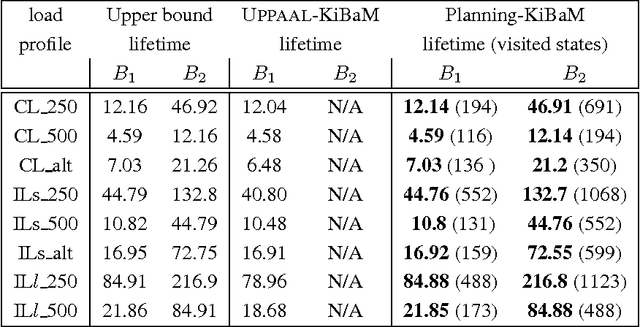
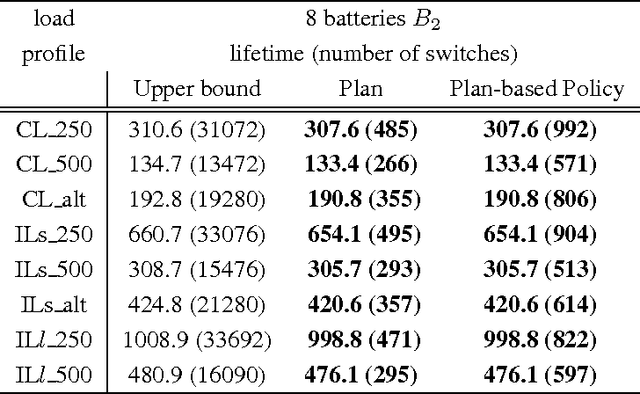
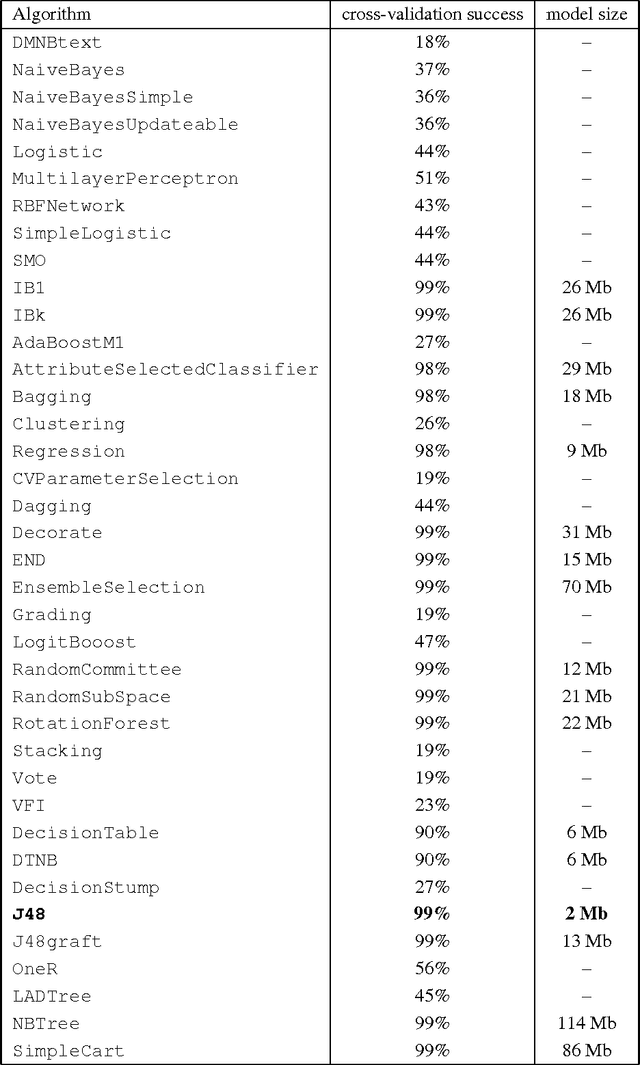
Efficient use of multiple batteries is a practical problem with wide and growing application. The problem can be cast as a planning problem under uncertainty. We describe the approach we have adopted to modelling and solving this problem, seen as a Markov Decision Problem, building effective policies for battery switching in the face of stochastic load profiles. Our solution exploits and adapts several existing techniques: planning for deterministic mixed discrete-continuous problems and Monte Carlo sampling for policy learning. The paper describes the development of planning techniques to allow solution of the non-linear continuous dynamic models capturing the battery behaviours. This approach depends on carefully handled discretisation of the temporal dimension. The construction of policies is performed using a classification approach and this idea offers opportunities for wider exploitation in other problems. The approach and its generality are described in the paper. Application of the approach leads to construction of policies that, in simulation, significantly outperform those that are currently in use and the best published solutions to the battery management problem. We achieve solutions that achieve more than 99% efficiency in simulation compared with the theoretical limit and do so with far fewer battery switches than existing policies. Behaviour of physical batteries does not exactly match the simulated models for many reasons, so to confirm that our theoretical results can lead to real measured improvements in performance we also conduct and report experiments using a physical test system. These results demonstrate that we can obtain 5%-15% improvement in lifetimes in the case of a two battery system.
COLIN: Planning with Continuous Linear Numeric Change
Jan 23, 2014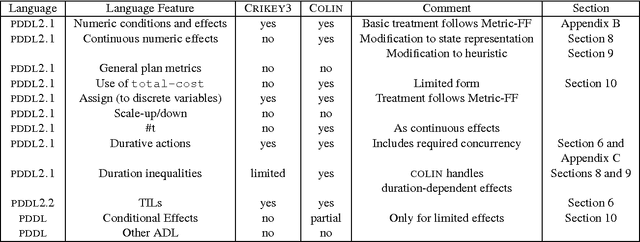
In this paper we describe COLIN, a forward-chaining heuristic search planner, capable of reasoning with COntinuous LINear numeric change, in addition to the full temporal semantics of PDDL. Through this work we make two advances to the state-of-the-art in terms of expressive reasoning capabilities of planners: the handling of continuous linear change, and the handling of duration-dependent effects in combination with duration inequalities, both of which require tightly coupled temporal and numeric reasoning during planning. COLIN combines FF-style forward chaining search, with the use of a Linear Program (LP) to check the consistency of the interacting temporal and numeric constraints at each state. The LP is used to compute bounds on the values of variables in each state, reducing the range of actions that need to be considered for application. In addition, we develop an extension of the Temporal Relaxed Planning Graph heuristic of CRIKEY3, to support reasoning directly with continuous change. We extend the range of task variables considered to be suitable candidates for specifying the gradient of the continuous numeric change effected by an action. Finally, we explore the potential for employing mixed integer programming as a tool for optimising the timestamps of the actions in the plan, once a solution has been found. To support this, we further contribute a selection of extended benchmark domains that include continuous numeric effects. We present results for COLIN that demonstrate its scalability on a range of benchmarks, and compare to existing state-of-the-art planners.
Proceedings of the 2nd Workshop on Robots in Clutter: Preparing robots for the real world
Jun 15, 2013This volume represents the proceedings of the 2nd Workshop on Robots in Clutter: Preparing robots for the real world, held June 27, 2013, at the Robotics: Science and Systems conference in Berlin, Germany.