 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrating Saliency Ranking and Reinforcement Learning for Enhanced Object Detection
Aug 13, 2024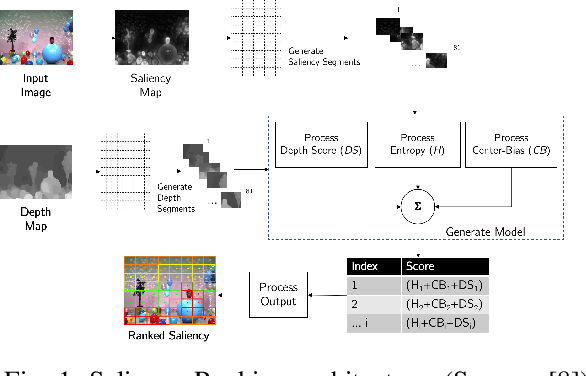
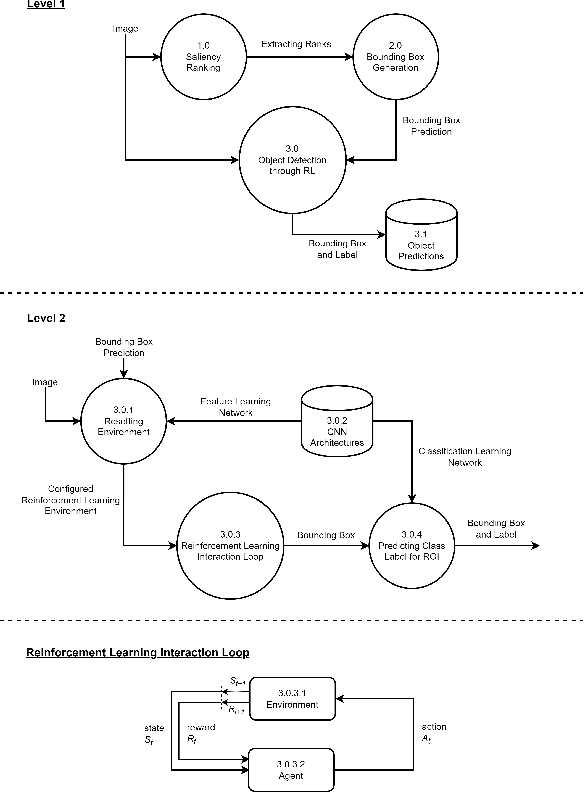
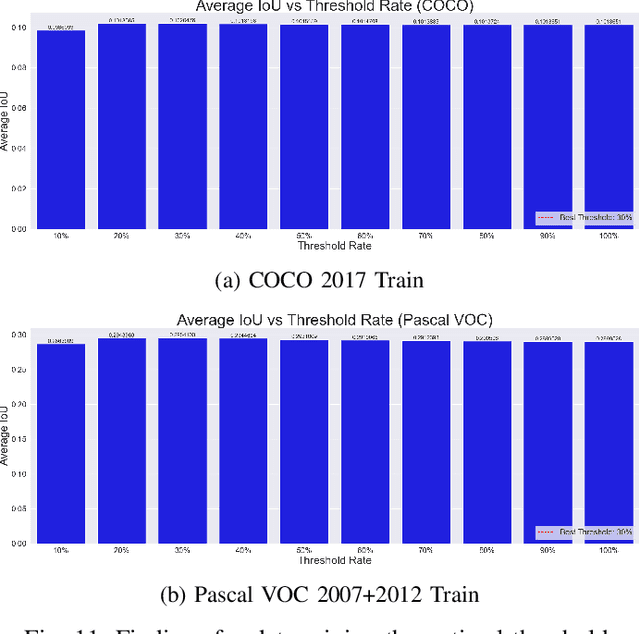
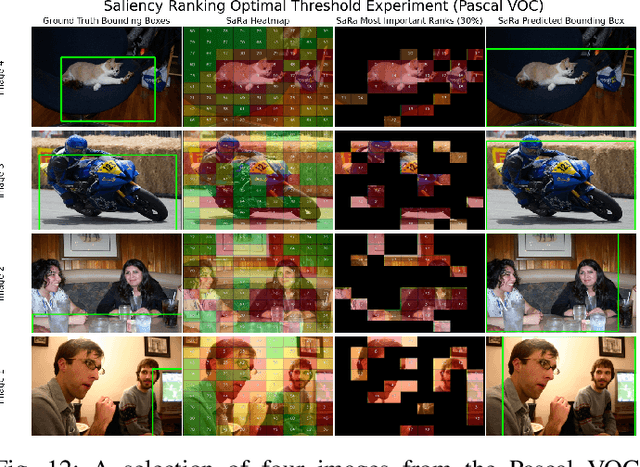
With the ever-growing variety of object detection approaches, this study explores a series of experiments that combine reinforcement learning (RL)-based visual attention methods with saliency ranking techniques to investigate transparent and sustainable solutions. By integrating saliency ranking for initial bounding box prediction and subsequently applying RL techniques to refine these predictions through a finite set of actions over multiple time steps, this study aims to enhance RL object detection accuracy. Presented as a series of experiments, this research investigates the use of various image feature extraction methods and explores diverse Deep Q-Network (DQN) architectural variations for deep reinforcement learning-based localisation agent training. Additionally, we focus on optimising the detection pipeline at every step by prioritising lightweight and faster models, while also incorporating the capability to classify detected objects, a feature absent in previous RL approaches. We show that by evaluating the performance of these trained agents using the Pascal VOC 2007 dataset, faster and more optimised models were developed. Notably, the best mean Average Precision (mAP) achieved in this study was 51.4, surpassing benchmarks set by RL-based single object detectors in the literature.
Autonomous Navigation of Tractor-Trailer Vehicles through Roundabout Intersections
Jan 10, 2024In recent years, significant advancements have been made in the field of autonomous driving with the aim of increasing safety and efficiency. However, research that focuses on tractor-trailer vehicles is relatively sparse. Due to the physical characteristics and articulated joints, such vehicles require tailored models. While turning, the back wheels of the trailer turn at a tighter radius and the truck often has to deviate from the centre of the lane to accommodate this. Due to the lack of publicly available models, this work develops truck and trailer models using the high-fidelity simulation software CARLA, together with several roundabout scenarios, to establish a baseline dataset for benchmarks. Using a twin-q soft actor-critic algorithm, we train a quasi-end-to-end autonomous driving model which is able to achieve a 73% success rate on different roundabouts.
Real-time EEG-based Emotion Recognition using Discrete Wavelet Transforms on Full and Reduced Channel Signals
Oct 11, 2021

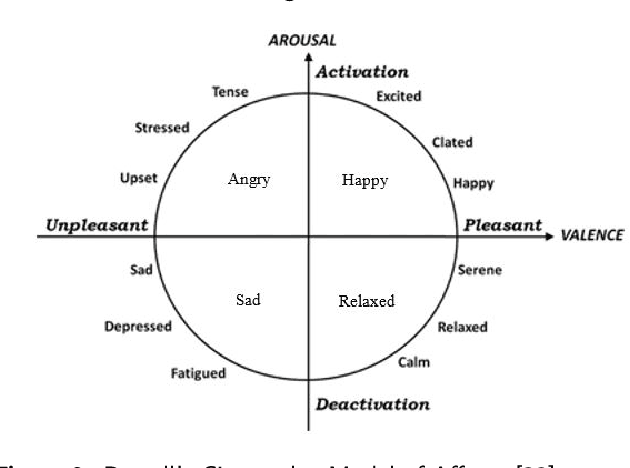
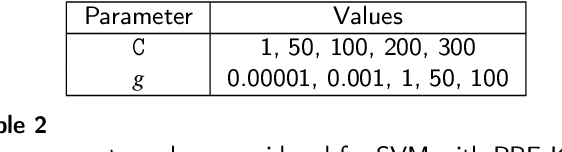
Real-time EEG-based Emotion Recognition (EEG-ER) with consumer-grade EEG devices involves classification of emotions using a reduced number of channels. These devices typically provide only four or five channels, unlike the high number of channels (32 or more) typically used in most current state-of-the-art research. In this work we propose to use Discrete Wavelet Transforms (DWT) to extract time-frequency domain features, and we use time-windows of a few seconds to perform EEG-ER classification. This technique can be used in real-time, as opposed to post-hoc on the full session data. We also apply baseline removal preprocessing, developed in prior research, to our proposed DWT Entropy and Energy features, which improves classification accuracy significantly. We consider two different classifier architectures, a 3D Convolutional Neural Network (3D CNN) and a Support Vector Machine (SVM). We evaluate both models on subject-independent and subject dependent setups to classify the Valence and Arousal dimensions of an individual's emotional state. We test them on both the full 32-channel data provided by the DEAP dataset, and also a reduced 5-channel extract of the same dataset. The SVM model performs best on all the presented scenarios, achieving an accuracy of 95.32% on Valence and 95.68% on Arousal for the full 32-channel subject-dependent case, beating prior real-time EEG-ER subject-dependent benchmarks. On the subject-independent case an accuracy of 80.70% on Valence and 81.41% on Arousal was also obtained. Reducing the input data to 5 channels only degrades the accuracy by an average of 3.54% across all scenarios, making this model appropriate for use with more accessible low-end EEG devices.
Efficient Temporal Piecewise-Linear Numeric Planning with Lazy Consistency Checking
May 21, 2021
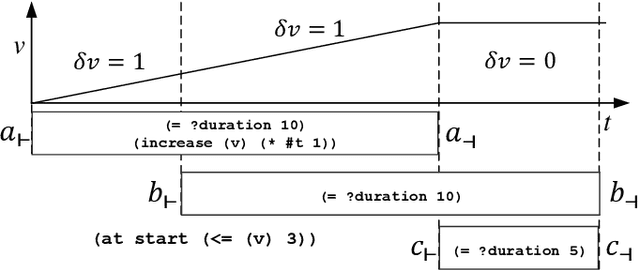
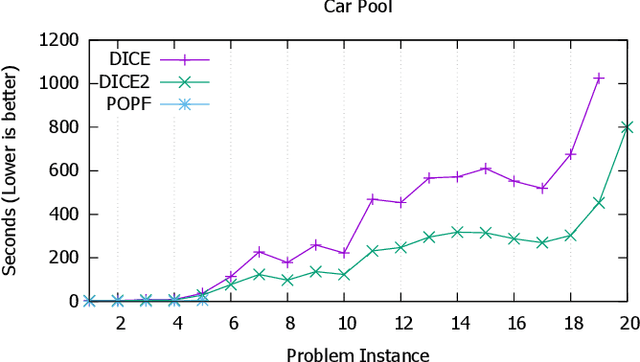
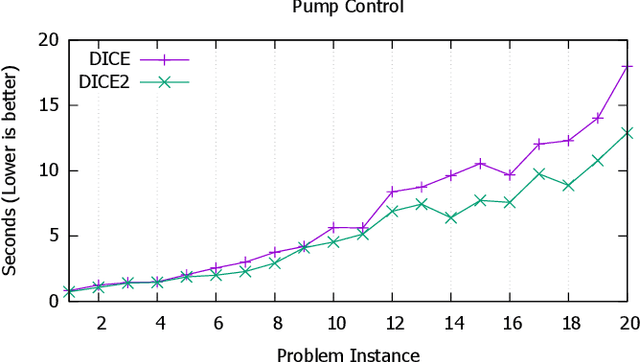
State-of-the-art temporal planners that support continuous numeric effects typically interweave search with scheduling to ensure temporal consistency. If such effects are linear, this process often makes use of Linear Programming (LP) to model the relationship between temporal constraints and conditions on numeric fluents that are subject to duration-dependent effects. While very effective on benchmark domains, this approach does not scale well when solving real-world problems that require long plans. We propose a set of techniques that allow the planner to compute LP consistency checks lazily where possible, significantly reducing the computation time required, thus allowing the planner to solve larger problem instances within an acceptable time-frame. We also propose an algorithm to perform duration-dependent goal checking more selectively. Furthermore, we propose an LP formulation with a smaller footprint that removes linearity restrictions on discrete effects applied within segments of the plan where a numeric fluent is not duration dependent. The effectiveness of these techniques is demonstrated on domains that use a mix of discrete and continuous effects, which is typical of real-world planning problems. The resultant planner is not only more efficient, but outperforms most state-of-the-art temporal-numeric and hybrid planners, in terms of both coverage and scalability.