 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEffect of Active and Passive Protective Soft Skins on Collision Forces in Human-robot Collaboration
Mar 18, 2022

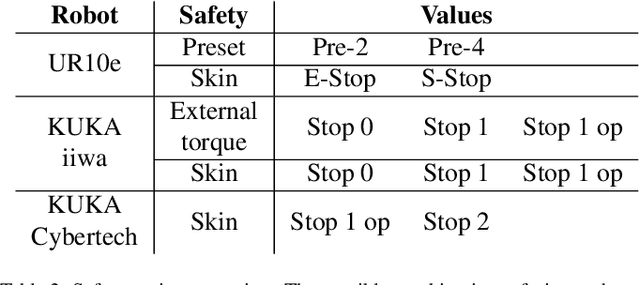

Soft electronic skins are one of the means to turn an industrial manipulator into a collaborative robot. For manipulators that are already fit for physical human-robot collaboration, soft skins can make them safer. In this work, we study the after impact behavior of two collaborative manipulators (UR10e and KUKA LBR iiwa) and one classical industrial manipulator (KUKA Cybertech), in the presence or absence of an industrial protective skin (AIRSKIN). In addition, we isolate the effects of the passive padding and the active contribution of the sensor to robot reaction. We present a total of 2250 collision measurements and study the impact force, contact duration, clamping force, and impulse. The dataset is publicly available. We summarize our results as follows. For transient collisions, the passive skin properties lowered the impact forces by about 40 %. During quasi-static contact, the effect of skin covers -- active or passive -- cannot be isolated from the collision detection and reaction by the collaborative robots. Important effects of the stop categories triggered by the active protective skin were found. We systematically compare the different settings and the empirically established safe velocities with prescriptions by the ISO/TS 15066. In some cases, up to the quadruple of the ISO/TS 15066 prescribed velocity can comply with the impact force limits and thus be considered safe. We propose an extension of the formulas relating impact force and permissible velocity that take into account the stiffness and compressible thickness of the protective cover, leading to better predictions of the collision forces. At the same time, this work emphasizes the need for in situ measurements as all the factors we studied -- presence of active/passive skin, safety stop settings, robot collision reaction, impact direction, and, of course, velocity -- have effects on the force evolution after impact.
High Dynamic Range SLAM with Map-Aware Exposure Time Control
Apr 20, 2018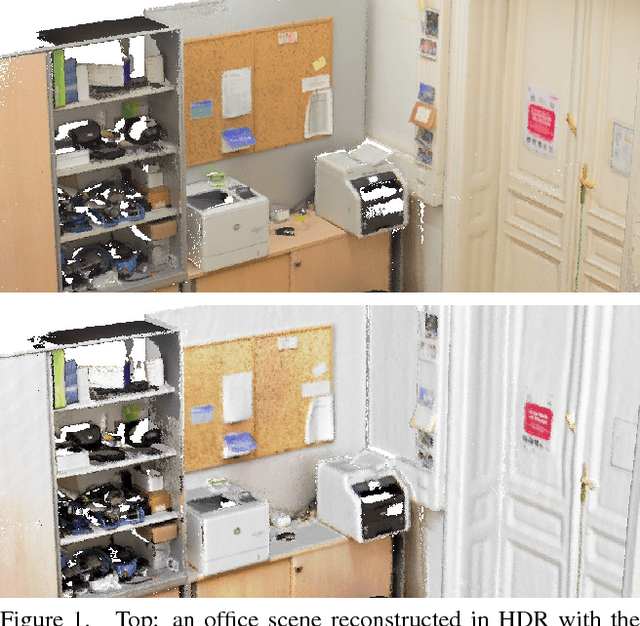
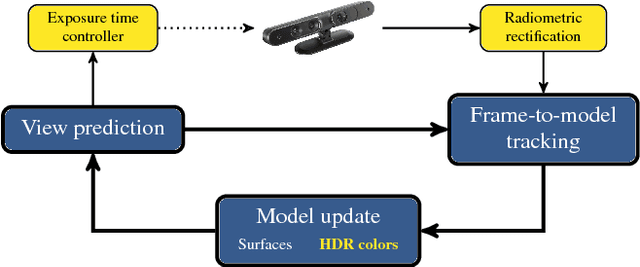
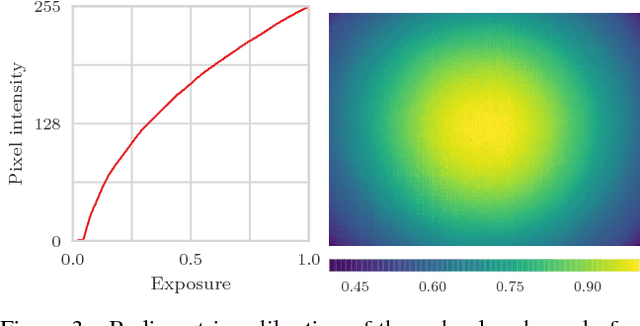
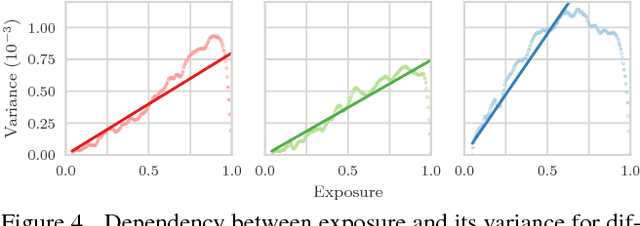
The research in dense online 3D mapping is mostly focused on the geometrical accuracy and spatial extent of the reconstructions. Their color appearance is often neglected, leading to inconsistent colors and noticeable artifacts. We rectify this by extending a state-of-the-art SLAM system to accumulate colors in HDR space. We replace the simplistic pixel intensity averaging scheme with HDR color fusion rules tailored to the incremental nature of SLAM and a noise model suitable for off-the-shelf RGB-D cameras. Our main contribution is a map-aware exposure time controller. It makes decisions based on the global state of the map and predicted camera motion, attempting to maximize the information gain of each observation. We report a set of experiments demonstrating the improved texture quality and advantages of using the custom controller that is tightly integrated in the mapping loop.
The STRANDS Project: Long-Term Autonomy in Everyday Environments
Oct 14, 2016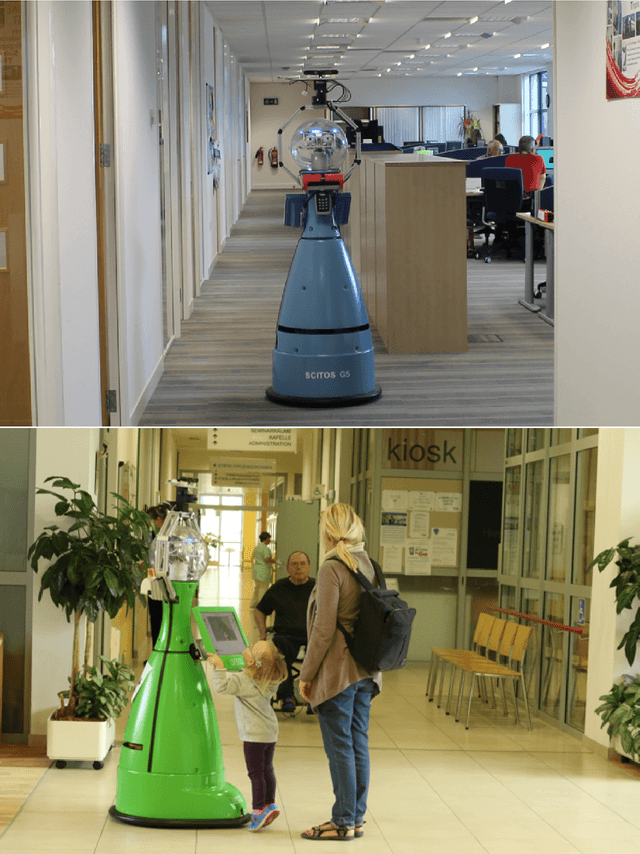
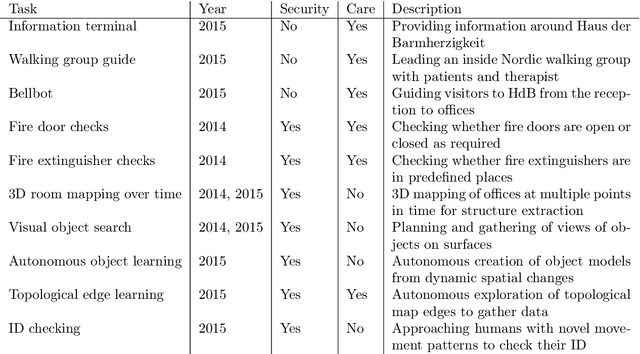
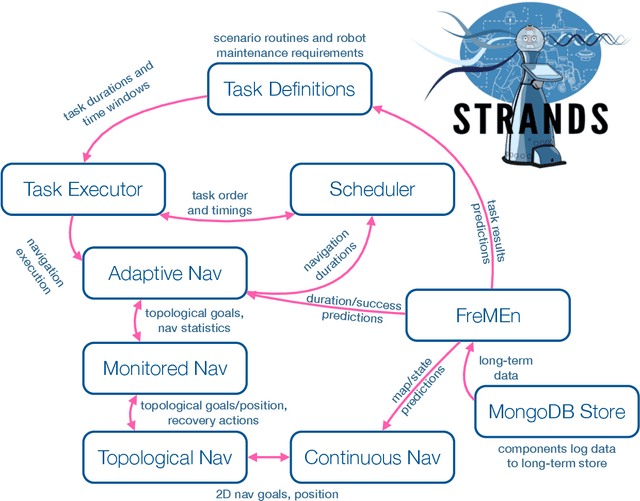
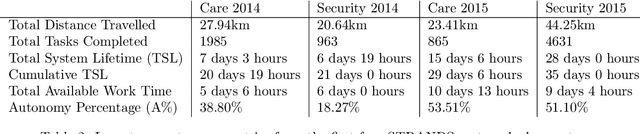
Thanks to the efforts of the robotics and autonomous systems community, robots are becoming ever more capable. There is also an increasing demand from end-users for autonomous service robots that can operate in real environments for extended periods. In the STRANDS project we are tackling this demand head-on by integrating state-of-the-art artificial intelligence and robotics research into mobile service robots, and deploying these systems for long-term installations in security and care environments. Over four deployments, our robots have been operational for a combined duration of 104 days autonomously performing end-user defined tasks, covering 116km in the process. In this article we describe the approach we have used to enable long-term autonomous operation in everyday environments, and how our robots are able to use their long run times to improve their own performance.
Proceedings of the 2nd Workshop on Robots in Clutter: Preparing robots for the real world
Jun 15, 2013This volume represents the proceedings of the 2nd Workshop on Robots in Clutter: Preparing robots for the real world, held June 27, 2013, at the Robotics: Science and Systems conference in Berlin, Germany.