 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Planning in Dynamic Environments: A Survey from Classical to Modern Methods
Jun 01, 2026Motion planning in dynamic environments requires robots to continuously adapt their paths in response to environmental changes for safe and uninterrupted navigation. While many surveys have reviewed planning in static settings, systematic reviews focused on dynamic environments remain limited. This paper presents a comprehensive survey of 138 works, primarily published between 2015 and 2025, spanning both classical and learning-based approaches. The motion planning methods are grouped into five categories based on the concepts of sampling, graph search, model predictive control, learning, and additional classical local planning approaches, including velocity obstacles, potential fields and dynamic windows. The learning techniques include supervised learning and reinforcement learning. We also discuss the role of dynamic perception in motion planning, covering techniques for detecting and modeling moving obstacles using cameras, LiDAR, and event-based sensors. The survey analyzes the principles, strengths, and limitations of each method, with particular attention to challenges unique to dynamic environments, such as prediction uncertainty, human-robot interaction, and the freezing robot problem. The survey provides researchers with a structured understanding of motion planning methods in dynamic environments.
Multi-CAP: A Multi-Robot Connectivity-Aware Hierarchical Coverage Path Planning Algorithm for Unknown Environments
Sep 18, 2025Efficient coordination of multiple robots for coverage of large, unknown environments is a significant challenge that involves minimizing the total coverage path length while reducing inter-robot conflicts. In this paper, we introduce a Multi-robot Connectivity-Aware Planner (Multi-CAP), a hierarchical coverage path planning algorithm that facilitates multi-robot coordination through a novel connectivity-aware approach. The algorithm constructs and dynamically maintains an adjacency graph that represents the environment as a set of connected subareas. Critically, we make the assumption that the environment, while unknown, is bounded. This allows for incremental refinement of the adjacency graph online to ensure its structure represents the physical layout of the space, both in observed and unobserved areas of the map as robots explore the environment. We frame the task of assigning subareas to robots as a Vehicle Routing Problem (VRP), a well-studied problem for finding optimal routes for a fleet of vehicles. This is used to compute disjoint tours that minimize redundant travel, assigning each robot a unique, non-conflicting set of subareas. Each robot then executes its assigned tour, independently adapting its coverage strategy within each subarea to minimize path length based on real-time sensor observations of the subarea. We demonstrate through simulations and multi-robot hardware experiments that Multi-CAP significantly outperforms state-of-the-art methods in key metrics, including coverage time, total path length, and path overlap ratio. Ablation studies further validate the critical role of our connectivity-aware graph and the global tour planner in achieving these performance gains.
C*: A Coverage Path Planning Algorithm for Unknown Environments using Rapidly Covering Graphs
May 20, 2025


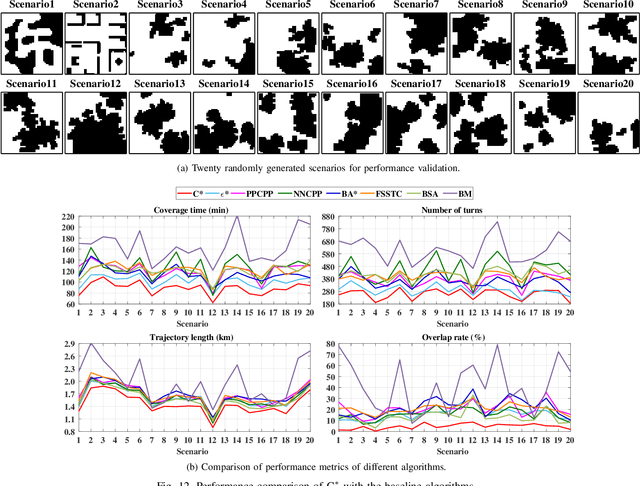
The paper presents a novel sample-based algorithm, called C*, for real-time coverage path planning (CPP) of unknown environments. The C* algorithm is built upon the concept of Rapidly Covering Graph (RCGs). The RCG is constructed incrementally via progressive sampling during robot navigation, which eliminates the need for cellular decomposition of the search space. The RCG has a sparse-graph structure formed by efficient sampling and pruning techniques, which produces non-myopic waypoints of the coverage trajectory. While C* produces the desired back and forth coverage pattern, it adapts to the TSP-based locally optimal coverage of small uncovered regions, called coverage holes, that are surrounded by obstacles and covered regions. Thus, C* proactively detects and covers the coverage holes in situ, which reduces the coverage time by preventing the longer return trajectories from distant regions to cover such holes later. The algorithmic simplicity and low computational complexity of C* makes it easy to implement and suitable for real-time onboard applications. It is analytically proven that C* provides complete coverage of unknown environments. The performance of C* is validated by 1) extensive high-fidelity simulations and 2) real laboratory experiments using autonomous robots. A comparative evaluation with seven existing CPP methods demonstrate that C* yields significant performance improvements in terms of coverage time, number of turns, trajectory length and overlap ratio, while preventing the formation of coverage holes. Finally, C* is evaluated on two different applications of CPP using 1) energy-constrained robots and 2) multi-robot teams.
An Underwater, Fault-Tolerant, Laser-Aided Robotic Multi-Modal Dense SLAM System for Continuous Underwater In-Situ Observation
Apr 30, 2025Existing underwater SLAM systems are difficult to work effectively in texture-sparse and geometrically degraded underwater environments, resulting in intermittent tracking and sparse mapping. Therefore, we present Water-DSLAM, a novel laser-aided multi-sensor fusion system that can achieve uninterrupted, fault-tolerant dense SLAM capable of continuous in-situ observation in diverse complex underwater scenarios through three key innovations: Firstly, we develop Water-Scanner, a multi-sensor fusion robotic platform featuring a self-designed Underwater Binocular Structured Light (UBSL) module that enables high-precision 3D perception. Secondly, we propose a fault-tolerant triple-subsystem architecture combining: 1) DP-INS (DVL- and Pressure-aided Inertial Navigation System): fusing inertial measurement unit, doppler velocity log, and pressure sensor based Error-State Kalman Filter (ESKF) to provide high-frequency absolute odometry 2) Water-UBSL: a novel Iterated ESKF (IESKF)-based tight coupling between UBSL and DP-INS to mitigate UBSL's degeneration issues 3) Water-Stereo: a fusion of DP-INS and stereo camera for accurate initialization and tracking. Thirdly, we introduce a multi-modal factor graph back-end that dynamically fuses heterogeneous sensor data. The proposed multi-sensor factor graph maintenance strategy efficiently addresses issues caused by asynchronous sensor frequencies and partial data loss. Experimental results demonstrate Water-DSLAM achieves superior robustness (0.039 m trajectory RMSE and 100\% continuity ratio during partial sensor dropout) and dense mapping (6922.4 points/m^3 in 750 m^3 water volume, approximately 10 times denser than existing methods) in various challenging environments, including pools, dark underwater scenes, 16-meter-deep sinkholes, and field rivers. Our project is available at https://water-scanner.github.io/.
SMART: Self-Morphing Anytime Replanning Tree
May 10, 2023The paper presents an algorithm, called Self- Morphing Anytime Replanning Tree (SMART), that facilitates anytime replanning in dynamic environments. SMART performs risk-based tree-pruning if its current path is obstructed by nearby moving obstacle(s), resulting in multiple disjoint subtrees. Then, for speedy recovery, it exploits these subtrees and performs informed tree-repair at hot-spots that lie at the intersection of subtrees to find a new path. The performance of SMART is comparatively evaluated with seven existing algorithms through extensive simulations. Two scenarios are considered with: 1) dynamic obstacles and 2) both static and dynamic obstacles. The results show that SMART yields significant improvements in replanning time, success rate and travel time. Finally, the performance of SMART is validated by a real laboratory experiment.
SMARRT: Self-Repairing Motion-Reactive Anytime RRT for Dynamic Environments
Sep 10, 2021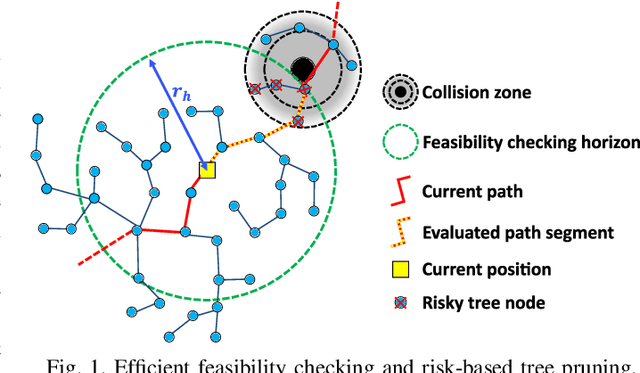
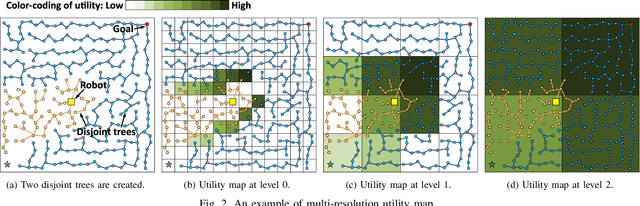
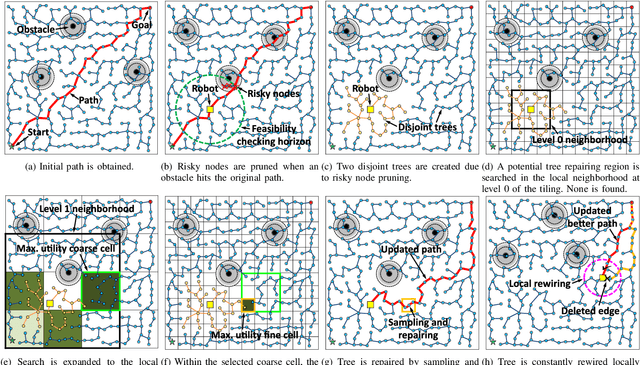
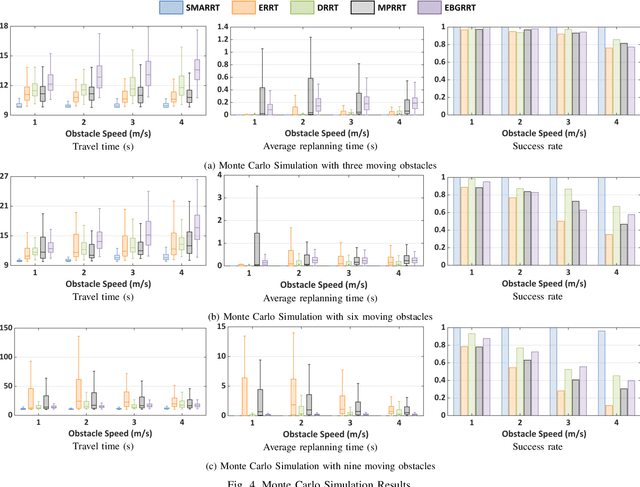
This paper addresses the fast replanning problem in dynamic environments with moving obstacles. Since for randomly moving obstacles the future states are unpredictable, the proposed method, called SMARRT, reacts to obstacle motions and revises the path in real-time based on the current interfering obstacle state (i.e., position and velocity). SMARRT is fast and efficient and performs collision checking only on the partial path segment close to the robot within a feasibility checking horizon. If the path is infeasible, then tree parts associated with the path inside the horizon are pruned while maintaining the maximal tree structure of already-explored regions. Then, a multi-resolution utility map is created to capture the environmental information used to compute the replanning utility for each cell on the multi-scale tiling. A hierarchical searching method is applied on the map to find the sampling cell efficiently. Finally, uniform samples are drawn within the sampling cell for fast replanning. The SMARRT method is validated via simulation runs, and the results are evaluated in comparison to four existing methods. The SMARRT method yields significant improvements in travel time, replanning time, and success rate compared against the existing methods.
CPPNet: A Coverage Path Planning Network
Aug 03, 2021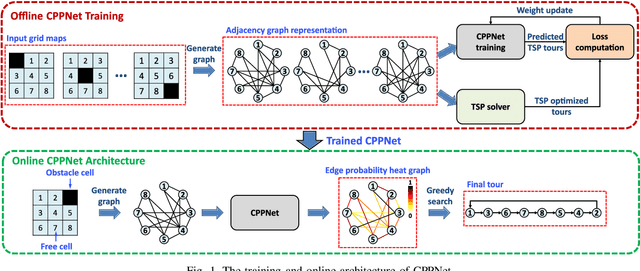
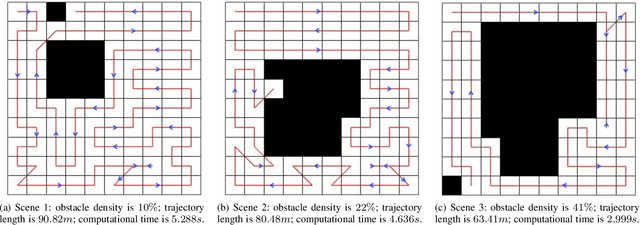
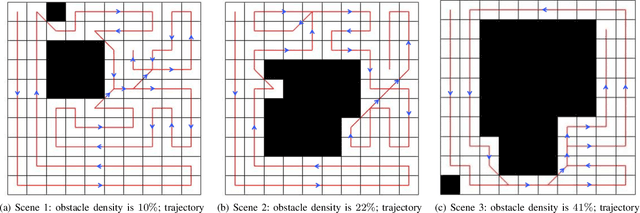
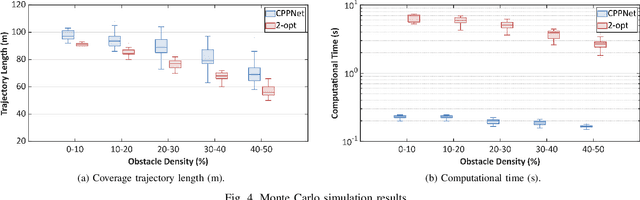
This paper presents a deep-learning based CPP algorithm, called Coverage Path Planning Network (CPPNet). CPPNet is built using a convolutional neural network (CNN) whose input is a graph-based representation of the occupancy grid map while its output is an edge probability heat graph, where the value of each edge is the probability of belonging to the optimal TSP tour. Finally, a greedy search is used to select the final optimized tour. CPPNet is trained and comparatively evaluated against the TSP tour. It is shown that CPPNet provides near-optimal solutions while requiring significantly less computational time, thus enabling real-time coverage path planning in partially unknown and dynamic environments.
A Non-uniform Sampling Approach for Fast and Efficient Path Planning
Aug 03, 2021

In this paper, we develop a non-uniform sampling approach for fast and efficient path planning of autonomous vehicles. The approach uses a novel non-uniform partitioning scheme that divides the area into obstacle-free convex cells. The partitioning results in large cells in obstacle-free areas and small cells in obstacle-dense areas. Subsequently, the boundaries of these cells are used for sampling; thus significantly reducing the burden of uniform sampling. When compared with a standard uniform sampler, this smart sampler significantly 1) reduces the size of the sampling space while providing completeness and optimality guarantee, 2) provides sparse sampling in obstacle-free regions and dense sampling in obstacle-rich regions to facilitate faster exploration, and 3) eliminates the need for expensive collision-checking with obstacles due to the convexity of the cells. This sampling framework is incorporated into the RRT* path planner. The results show that RRT* with the non-uniform sampler gives a significantly better convergence rate and smaller memory footprint as compared to RRT* with a uniform sampler.
MRRT: Multiple Rapidly-Exploring Random Trees for Fast Online Replanning in Dynamic Environments
Apr 22, 2021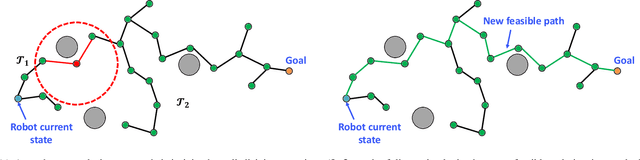
This paper presents a novel algorithm, called MRRT, which uses multiple rapidly-exploring random trees for fast online replanning of autonomous vehicles in dynamic environments with moving obstacles. The proposed algorithm is built upon the RRT algorithm with a multi-tree structure. At the beginning, the RRT algorithm is applied to find the initial solution based on partial knowledge of the environment. Then, the robot starts to execute this path. At each iteration, the new obstacle configurations are collected by the robot's sensor and used to replan the path. This new information can come from unknown static obstacles (e.g., seafloor layout) as well as moving obstacles. Then, to accommodate the environmental changes, two procedures are adopted: 1) edge pruning, and 2) tree regrowing. Specifically, the edge pruning procedure checks the collision status through the tree and only removes the invalid edges while maintaining the tree structure of already-explored regions. Due to removal of invalid edges, the tree could be broken into multiple disjoint trees. As such, the RRT algorithm is applied to regrow the trees. Specifically, a sample is created randomly and joined to all the disjoint trees in its local neighborhood by connecting to the nearest nodes. Finally, a new solution is found for the robot. The advantages of the proposed MRRT algorithm are as follows: i) retains the maximal tree structure by only pruning the edges which collide with the obstacles, ii) guarantees probabilistic completeness, and iii) is computational efficient for fast replanning since all disjoint trees are maintained for future connections and expanded simultaneously.
CT-CPP: 3D Coverage Path Planning for Unknown Terrain Reconstruction using Coverage Trees
Oct 19, 2020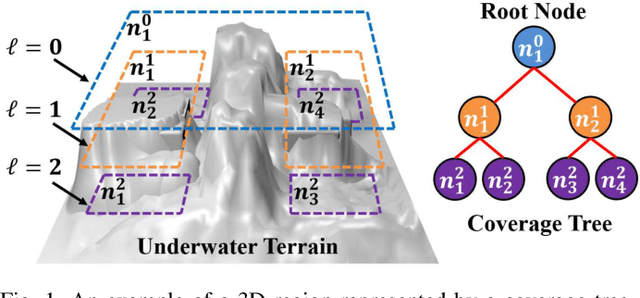
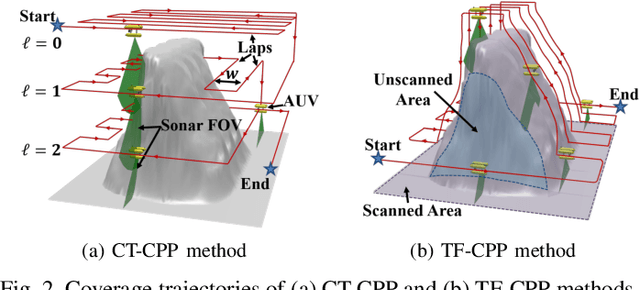


This letter addresses the 3D coverage path planning (CPP) problem for terrain reconstruction of unknown obstacle rich environments. Due to sensing limitations, the proposed method, called CT-CPP, performs layered scanning of the 3D region to collect terrain data, where the traveling sequence is optimized using the concept of a coverage tree (CT). A modified TSP-based tree traversal strategy is proposed, and compared with breadth-first search (BFS) and depth-first search (DFS) methods, with TSP providing the shortest trajectory lengths. The CT-CPP method is validated on a high-fidelity underwater simulator and the results are evaluated in comparison to an existing terrain following CPP method (TF-CPP). The CT-CPP with TSP optimizer yields significant improvements in trajectory length, energy consumption, and reconstruction error.