 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCT-CPP: 3D Coverage Path Planning for Unknown Terrain Reconstruction using Coverage Trees
Paper and Code
Oct 19, 2020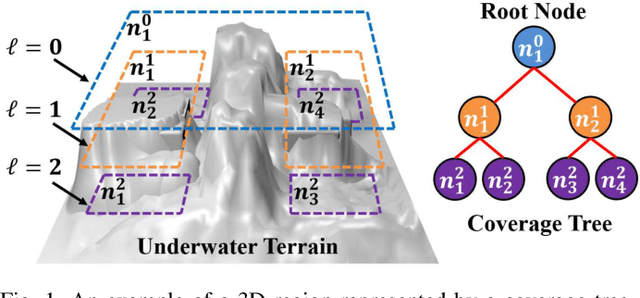
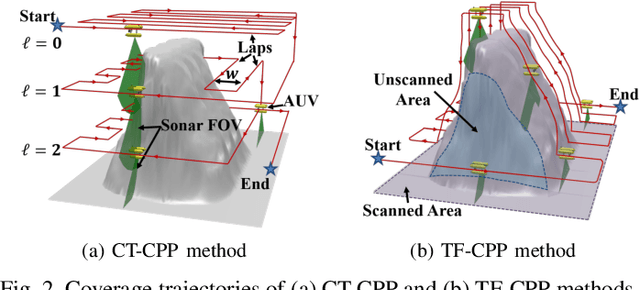


This letter addresses the 3D coverage path planning (CPP) problem for terrain reconstruction of unknown obstacle rich environments. Due to sensing limitations, the proposed method, called CT-CPP, performs layered scanning of the 3D region to collect terrain data, where the traveling sequence is optimized using the concept of a coverage tree (CT). A modified TSP-based tree traversal strategy is proposed, and compared with breadth-first search (BFS) and depth-first search (DFS) methods, with TSP providing the shortest trajectory lengths. The CT-CPP method is validated on a high-fidelity underwater simulator and the results are evaluated in comparison to an existing terrain following CPP method (TF-CPP). The CT-CPP with TSP optimizer yields significant improvements in trajectory length, energy consumption, and reconstruction error.