 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCT-CPP: 3D Coverage Path Planning for Unknown Terrain Reconstruction using Coverage Trees
Oct 19, 2020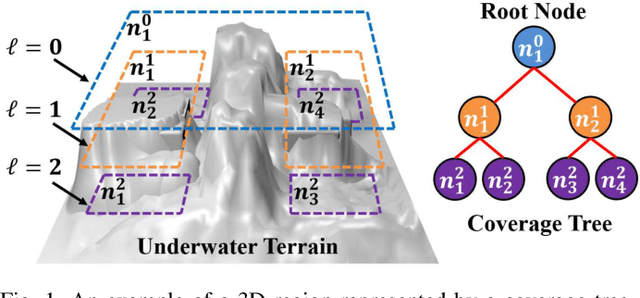
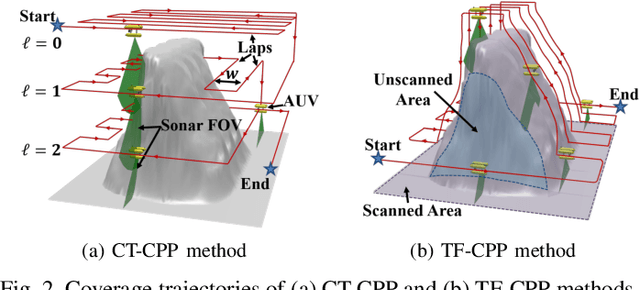


This letter addresses the 3D coverage path planning (CPP) problem for terrain reconstruction of unknown obstacle rich environments. Due to sensing limitations, the proposed method, called CT-CPP, performs layered scanning of the 3D region to collect terrain data, where the traveling sequence is optimized using the concept of a coverage tree (CT). A modified TSP-based tree traversal strategy is proposed, and compared with breadth-first search (BFS) and depth-first search (DFS) methods, with TSP providing the shortest trajectory lengths. The CT-CPP method is validated on a high-fidelity underwater simulator and the results are evaluated in comparison to an existing terrain following CPP method (TF-CPP). The CT-CPP with TSP optimizer yields significant improvements in trajectory length, energy consumption, and reconstruction error.
Rapid Motion-Planning for Dubins Vehicles under Environmental Drifts
Sep 09, 2019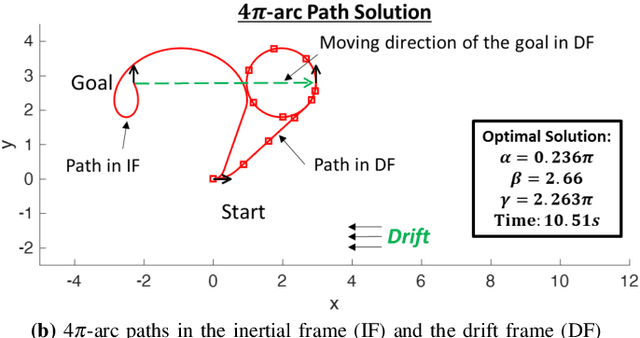
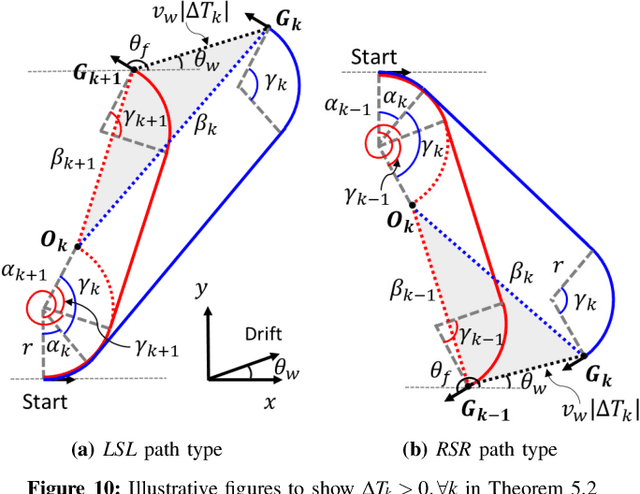
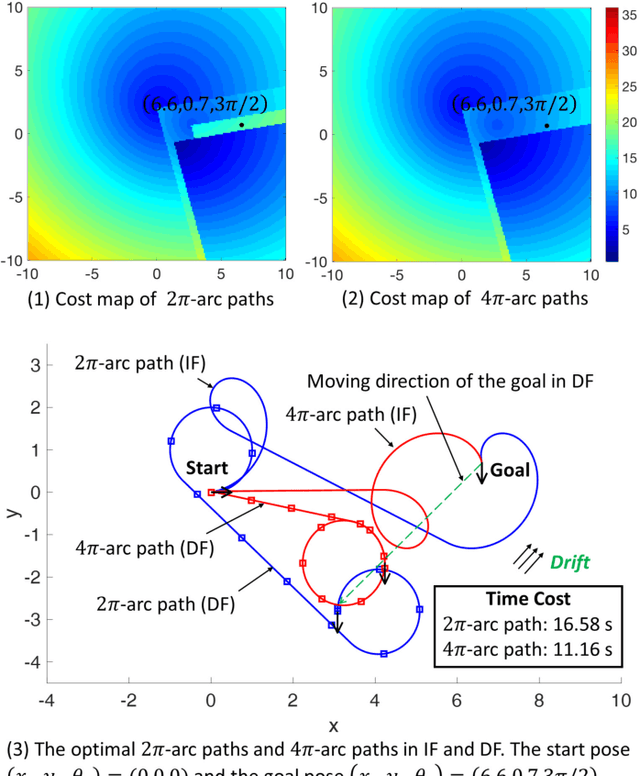
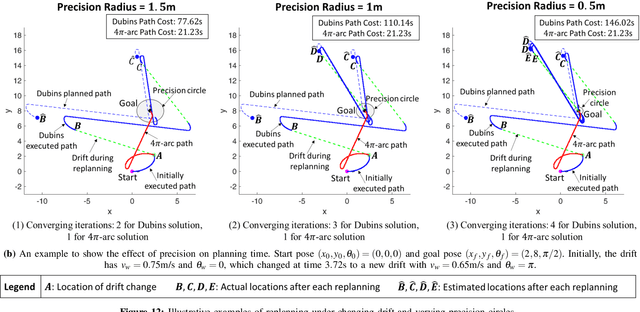
This paper presents a rapid (i.e., (near) real time) solution to the minimum-time motion planning problem for Dubins vehicles under environmental drifts (e.g., wind or ocean currents). Real-time solutions are essential in time-critical situations (e.g., replanning under dynamically changing environments or tracking fast moving targets). Typically, Dubins problem requires to solve for six path types; however, due to the presence of drifts, four of these path types require to solve the root-finding problem involving transcendental functions. Thus, the existing solution methods result in high computation times and their applicability for real-time applications is limited. In this regard, in order to obtain a (near) real-time solution, this paper proposes a novel approach where only a subset of two Dubins path types (i.e., LSL and RSR) are used which have direct analytical solutions in the presence of drifts. We show that by extending the feasible range of circular arcs in these path types: 1) full reachability of any goal pose is guaranteed, and 2) even better paths can be produced with lower time costs. Theoretical findings are comparatively evaluated by extensive Monte-Carlo simulations.
CARE: Cooperative Autonomy for Resilience and Efficiency of Robot Teams for Complete Coverage of Unknown Environments under Robot Failures
May 29, 2019



This paper addresses the problem of Multi-robot Coverage Path Planning (MCPP) for unknown environments in the presence of robot failures. Unexpected robot failures can seriously degrade the performance of a robot team and in extreme cases jeopardize the overall operation. Therefore, this paper presents a distributed algorithm, called Cooperative Autonomy for Resilience and Efficiency (CARE), which not only provides resilience to the robot team against failures of individual robots, but also improves the overall efficiency of operation via event-driven replanning. The algorithm uses distributed Discrete Event Supervisors (DESs), which trigger games between a set of feasible players in the event of a robot failure or idling, to make collaborative decisions for task reallocations. The game-theoretic structure is built using Potential Games, where the utility of each player is aligned with a shared objective function for all players. The algorithm has been validated in various complex scenarios on a high-fidelity robotic simulator, and the results demonstrate that the team achieves complete coverage under failures, reduced coverage time, and faster target discovery as compared to three alternative methods.