 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge$ε^*$+: An Online Coverage Path Planning Algorithm for Energy-constrained Autonomous Vehicles
Paper and Code
Aug 29, 2020
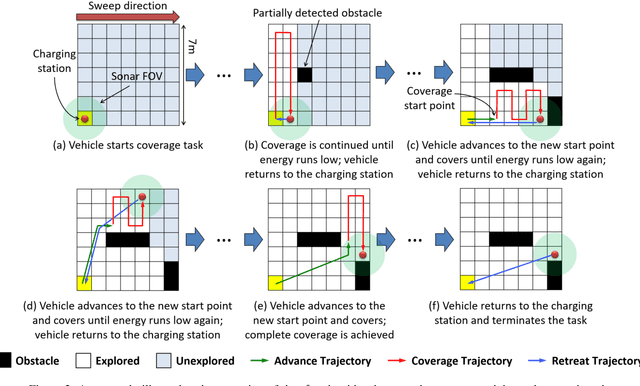
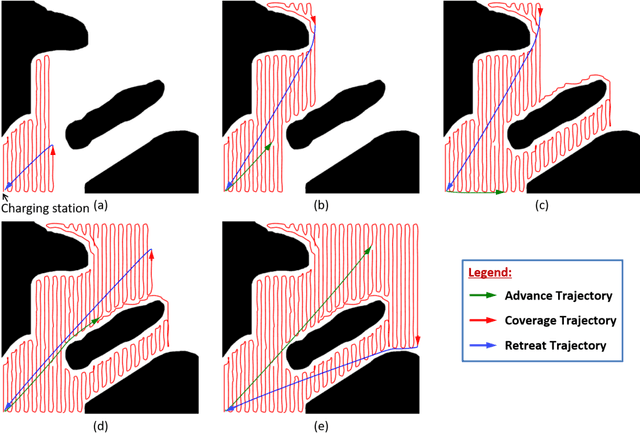
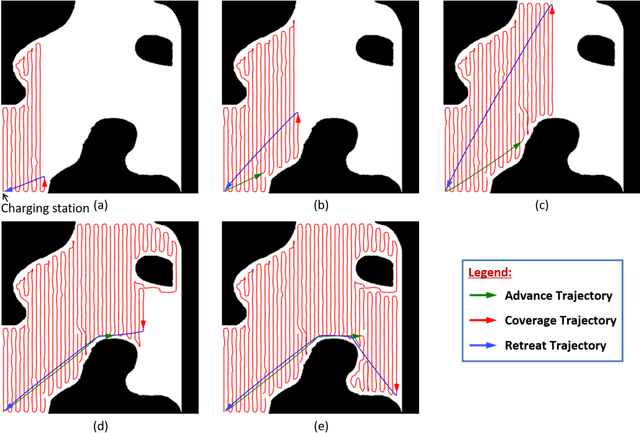
This paper presents a novel algorithm, called $\epsilon^*$+, for online coverage path planning of unknown environments using energy-constrained autonomous vehicles. Due to limited battery size, the energy-constrained vehicles have limited duration of operation time. Therefore, while executing a coverage trajectory, the vehicle has to return to the charging station for a recharge before the battery runs out. In this regard, the $\epsilon^*$+ algorithm enables the vehicle to retreat back to the charging station based on the remaining energy which is monitored throughout the coverage process. This is followed by an advance trajectory that takes the vehicle to a near by unexplored waypoint to restart the coverage process, instead of taking it back to the previous left over point of the retreat trajectory; thus reducing the overall coverage time. The proposed $\epsilon^*$+ algorithm is an extension of the $\epsilon^*$ algorithm, which utilizes an Exploratory Turing Machine (ETM) as a supervisor to navigate the vehicle with back and forth trajectory for complete coverage. The performance of the $\epsilon^*$+ algorithm is validated on complex scenarios using Player/Stage which is a high-fidelity robotic simulator.