 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMRRT: Multiple Rapidly-Exploring Random Trees for Fast Online Replanning in Dynamic Environments
Paper and Code
Apr 22, 2021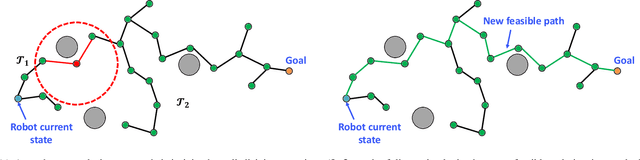
This paper presents a novel algorithm, called MRRT, which uses multiple rapidly-exploring random trees for fast online replanning of autonomous vehicles in dynamic environments with moving obstacles. The proposed algorithm is built upon the RRT algorithm with a multi-tree structure. At the beginning, the RRT algorithm is applied to find the initial solution based on partial knowledge of the environment. Then, the robot starts to execute this path. At each iteration, the new obstacle configurations are collected by the robot's sensor and used to replan the path. This new information can come from unknown static obstacles (e.g., seafloor layout) as well as moving obstacles. Then, to accommodate the environmental changes, two procedures are adopted: 1) edge pruning, and 2) tree regrowing. Specifically, the edge pruning procedure checks the collision status through the tree and only removes the invalid edges while maintaining the tree structure of already-explored regions. Due to removal of invalid edges, the tree could be broken into multiple disjoint trees. As such, the RRT algorithm is applied to regrow the trees. Specifically, a sample is created randomly and joined to all the disjoint trees in its local neighborhood by connecting to the nearest nodes. Finally, a new solution is found for the robot. The advantages of the proposed MRRT algorithm are as follows: i) retains the maximal tree structure by only pruning the edges which collide with the obstacles, ii) guarantees probabilistic completeness, and iii) is computational efficient for fast replanning since all disjoint trees are maintained for future connections and expanded simultaneously.