 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSMART: Self-Morphing Anytime Replanning Tree
May 10, 2023The paper presents an algorithm, called Self- Morphing Anytime Replanning Tree (SMART), that facilitates anytime replanning in dynamic environments. SMART performs risk-based tree-pruning if its current path is obstructed by nearby moving obstacle(s), resulting in multiple disjoint subtrees. Then, for speedy recovery, it exploits these subtrees and performs informed tree-repair at hot-spots that lie at the intersection of subtrees to find a new path. The performance of SMART is comparatively evaluated with seven existing algorithms through extensive simulations. Two scenarios are considered with: 1) dynamic obstacles and 2) both static and dynamic obstacles. The results show that SMART yields significant improvements in replanning time, success rate and travel time. Finally, the performance of SMART is validated by a real laboratory experiment.
SMARRT: Self-Repairing Motion-Reactive Anytime RRT for Dynamic Environments
Sep 10, 2021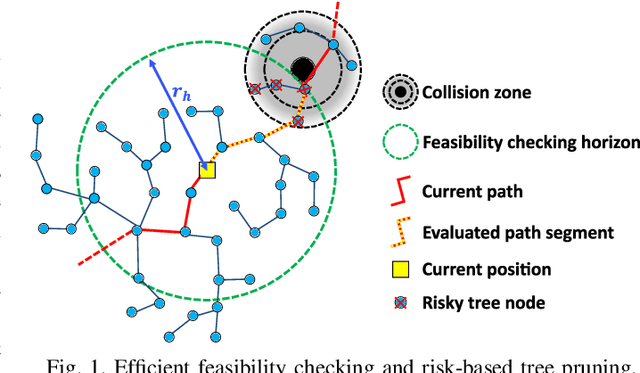
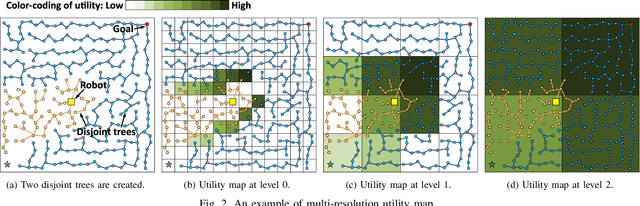
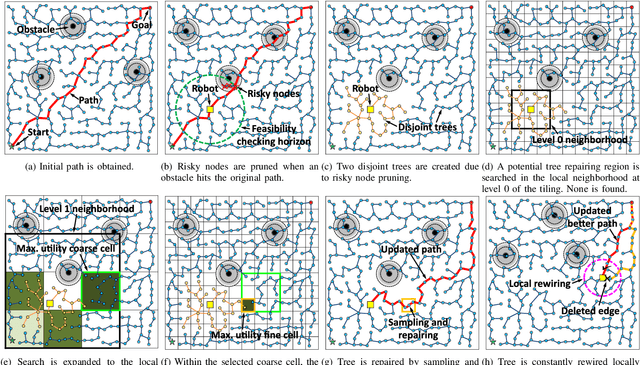
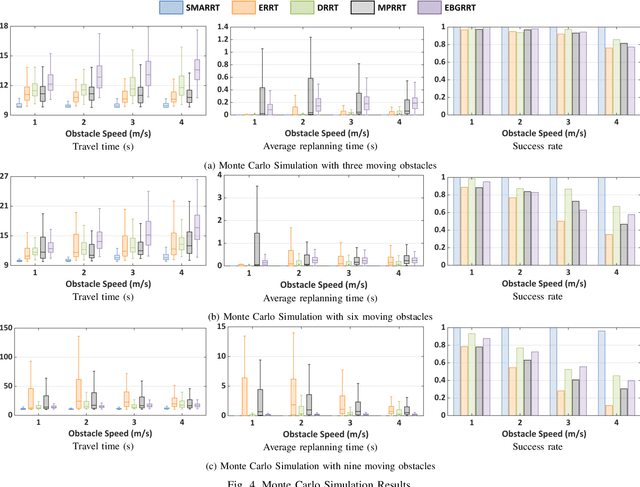
This paper addresses the fast replanning problem in dynamic environments with moving obstacles. Since for randomly moving obstacles the future states are unpredictable, the proposed method, called SMARRT, reacts to obstacle motions and revises the path in real-time based on the current interfering obstacle state (i.e., position and velocity). SMARRT is fast and efficient and performs collision checking only on the partial path segment close to the robot within a feasibility checking horizon. If the path is infeasible, then tree parts associated with the path inside the horizon are pruned while maintaining the maximal tree structure of already-explored regions. Then, a multi-resolution utility map is created to capture the environmental information used to compute the replanning utility for each cell on the multi-scale tiling. A hierarchical searching method is applied on the map to find the sampling cell efficiently. Finally, uniform samples are drawn within the sampling cell for fast replanning. The SMARRT method is validated via simulation runs, and the results are evaluated in comparison to four existing methods. The SMARRT method yields significant improvements in travel time, replanning time, and success rate compared against the existing methods.
CPPNet: A Coverage Path Planning Network
Aug 03, 2021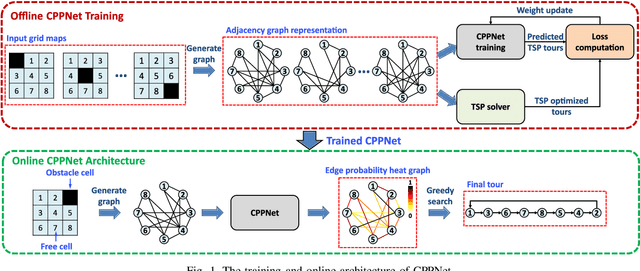
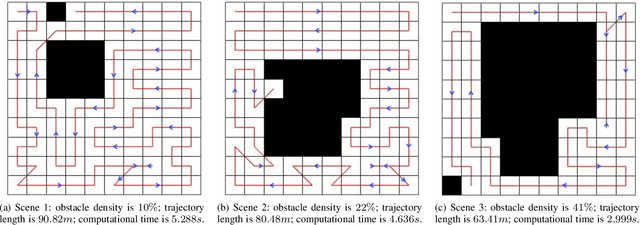
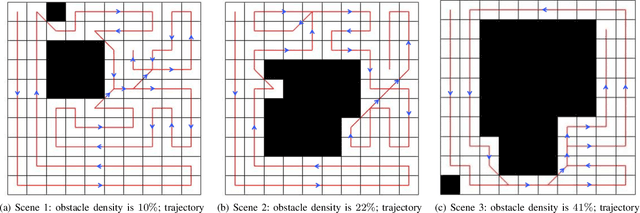
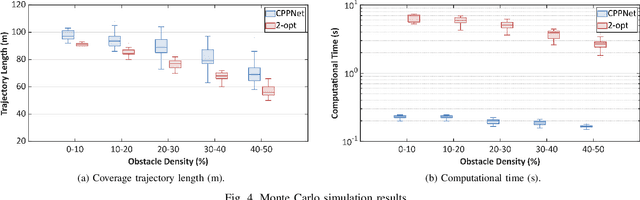
This paper presents a deep-learning based CPP algorithm, called Coverage Path Planning Network (CPPNet). CPPNet is built using a convolutional neural network (CNN) whose input is a graph-based representation of the occupancy grid map while its output is an edge probability heat graph, where the value of each edge is the probability of belonging to the optimal TSP tour. Finally, a greedy search is used to select the final optimized tour. CPPNet is trained and comparatively evaluated against the TSP tour. It is shown that CPPNet provides near-optimal solutions while requiring significantly less computational time, thus enabling real-time coverage path planning in partially unknown and dynamic environments.
MRRT: Multiple Rapidly-Exploring Random Trees for Fast Online Replanning in Dynamic Environments
Apr 22, 2021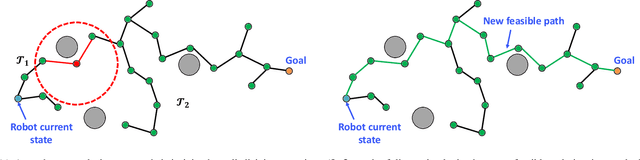
This paper presents a novel algorithm, called MRRT, which uses multiple rapidly-exploring random trees for fast online replanning of autonomous vehicles in dynamic environments with moving obstacles. The proposed algorithm is built upon the RRT algorithm with a multi-tree structure. At the beginning, the RRT algorithm is applied to find the initial solution based on partial knowledge of the environment. Then, the robot starts to execute this path. At each iteration, the new obstacle configurations are collected by the robot's sensor and used to replan the path. This new information can come from unknown static obstacles (e.g., seafloor layout) as well as moving obstacles. Then, to accommodate the environmental changes, two procedures are adopted: 1) edge pruning, and 2) tree regrowing. Specifically, the edge pruning procedure checks the collision status through the tree and only removes the invalid edges while maintaining the tree structure of already-explored regions. Due to removal of invalid edges, the tree could be broken into multiple disjoint trees. As such, the RRT algorithm is applied to regrow the trees. Specifically, a sample is created randomly and joined to all the disjoint trees in its local neighborhood by connecting to the nearest nodes. Finally, a new solution is found for the robot. The advantages of the proposed MRRT algorithm are as follows: i) retains the maximal tree structure by only pruning the edges which collide with the obstacles, ii) guarantees probabilistic completeness, and iii) is computational efficient for fast replanning since all disjoint trees are maintained for future connections and expanded simultaneously.