 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModular Verification of Autonomous Space Robotics
Aug 28, 2019
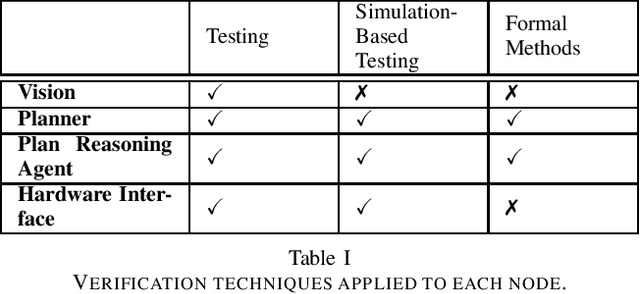
Ensuring that autonomous space robot control software behaves as it should is crucial, particularly as software failure in space often equates to mission failure and could potentially endanger nearby astronauts and costly equipment. To minimise mission failure caused by software errors, we can utilise a variety of tools and techniques to verify that the software behaves as intended. In particular, distinct nodes in a robotic system often require different verification techniques to ensure that they behave as expected. This paper introduces a method for integrating the various verification techniques that are applied to robotic software, via a First-Order Logic (FOL) specification that captures each node's assumptions and guarantees. These FOL specifications are then used to guide the verification of the individual nodes, be it by testing or the use of a formal method. We also outline a way of measuring our confidence in the verification of the entire system in terms of the verification techniques used.
Formal Specification and Verification of Autonomous Robotic Systems: A Survey
Sep 03, 2018



Robotic systems are complex and critical: they are inherently hybrid, combining both hardware and software; they typically exhibit both cyber-physical attributes and autonomous capabilities; and are required to be at least safe and often ethical. While for many engineered systems testing, either through real deployment or via simulation, is deemed sufficient the uniquely challenging elements of robotic systems, together with the crucial dependence on sophisticated software control and decision-making, requires a stronger form of verification. The increasing deployment of robotic systems in safety-critical scenarios exacerbates this still further and leads us towards the use of formal methods to ensure the correctness of, and provide sufficient evidence for the certification of, robotic systems. There have been many approaches that have used some variety of formal specification or formal verification in autonomous robotics, but there is no resource that collates this activity in to one place. This paper systematically surveys the state-of-the art in specification formalisms and tools for verifying robotic systems. Specifically, it describes the challenges arising from autonomy and software architectures, avoiding low-level hardware control and is subsequently identifies approaches for the specification and verification of robotic systems, while avoiding more general approaches.
A Corroborative Approach to Verification and Validation of Human--Robot Teams
Aug 15, 2018

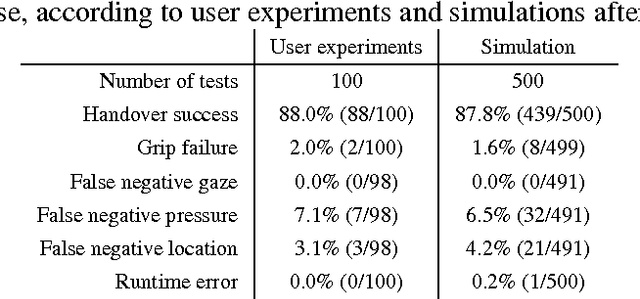
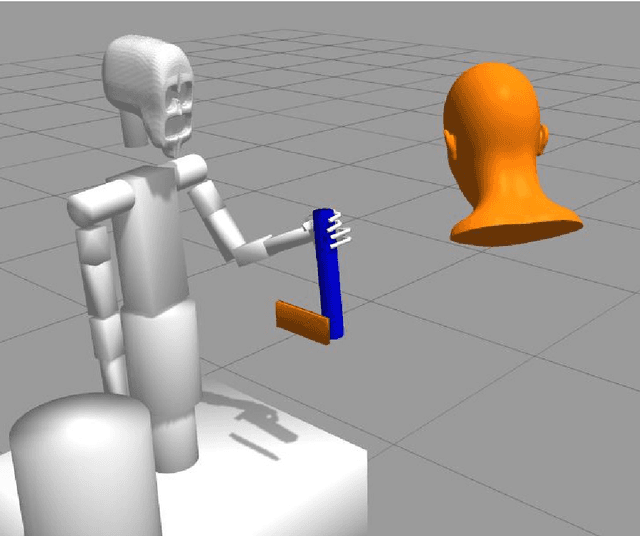
We present an approach for the verification and validation (V&V) of robot assistants in the context of human-robot interactions (HRI), to demonstrate their trustworthiness through corroborative evidence of their safety and functional correctness. Key challenges include the complex and unpredictable nature of the real world in which assistant and service robots operate, the limitations on available V&V techniques when used individually, and the consequent lack of confidence in the V&V results. Our approach, called corroborative V&V, addresses these challenges by combining several different V&V techniques; in this paper we use formal verification (model checking), simulation-based testing, and user validation in experiments with a real robot. We demonstrate our corroborative V&V approach through a handover task, the most critical part of a complex cooperative manufacturing scenario, for which we propose some safety and liveness requirements to verify and validate. We construct formal models, simulations and an experimental test rig for the HRI. To capture requirements we use temporal logic properties, assertion checkers and textual descriptions. This combination of approaches allows V&V of the HRI task at different levels of modelling detail and thoroughness of exploration, thus overcoming the individual limitations of each technique. Should the resulting V&V evidence present discrepancies, an iterative process between the different V&V techniques takes place until corroboration between the V&V techniques is gained from refining and improving the assets (i.e., system and requirement models) to represent the HRI task in a more truthful manner. Therefore, corroborative V&V affords a systematic approach to 'meta-V&V,' in which different V&V techniques can be used to corroborate and check one another, increasing the level of certainty in the results of V&V.
A Resolution Prover for Coalition Logic
Apr 03, 2014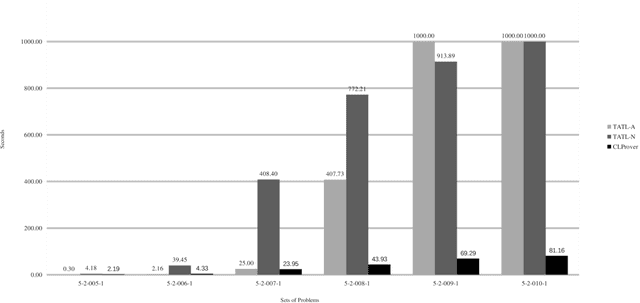
We present a prototype tool for automated reasoning for Coalition Logic, a non-normal modal logic that can be used for reasoning about cooperative agency. The theorem prover CLProver is based on recent work on a resolution-based calculus for Coalition Logic that operates on coalition problems, a normal form for Coalition Logic. We provide an overview of coalition problems and of the resolution-based calculus for Coalition Logic. We then give details of the implementation of CLProver and present the results for a comparison with an existing tableau-based solver.
* In Proceedings SR 2014, arXiv:1404.0414
Clausal Temporal Resolution
Apr 14, 2000In this article, we examine how clausal resolution can be applied to a specific, but widely used, non-classical logic, namely discrete linear temporal logic. Thus, we first define a normal form for temporal formulae and show how arbitrary temporal formulae can be translated into the normal form, while preserving satisfiability. We then introduce novel resolution rules that can be applied to formulae in this normal form, provide a range of examples and examine the correctness and complexity of this approach is examined and. This clausal resolution approach. Finally, we describe related work and future developments concerning this work.