 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Corroborative Approach to Verification and Validation of Human--Robot Teams
Paper and Code


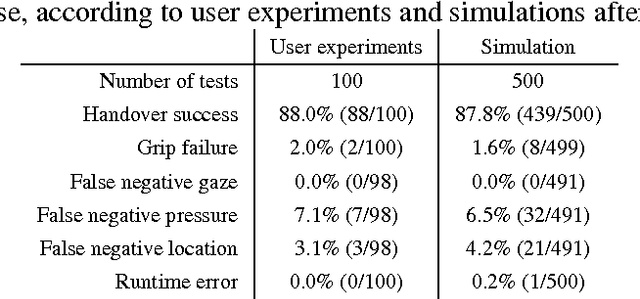
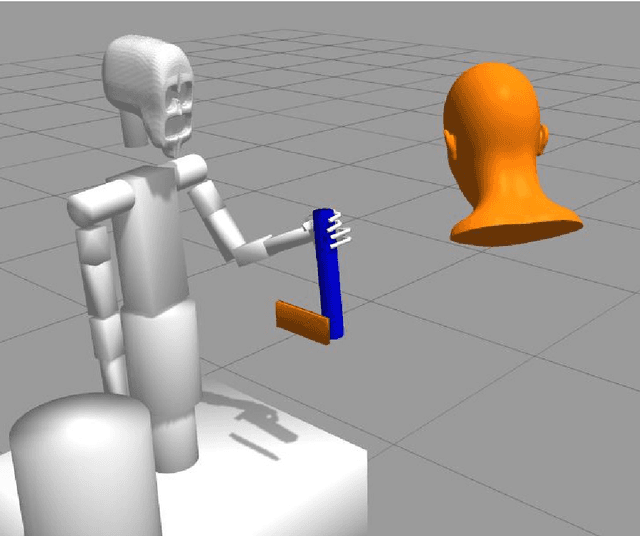
We present an approach for the verification and validation (V&V) of robot assistants in the context of human-robot interactions (HRI), to demonstrate their trustworthiness through corroborative evidence of their safety and functional correctness. Key challenges include the complex and unpredictable nature of the real world in which assistant and service robots operate, the limitations on available V&V techniques when used individually, and the consequent lack of confidence in the V&V results. Our approach, called corroborative V&V, addresses these challenges by combining several different V&V techniques; in this paper we use formal verification (model checking), simulation-based testing, and user validation in experiments with a real robot. We demonstrate our corroborative V&V approach through a handover task, the most critical part of a complex cooperative manufacturing scenario, for which we propose some safety and liveness requirements to verify and validate. We construct formal models, simulations and an experimental test rig for the HRI. To capture requirements we use temporal logic properties, assertion checkers and textual descriptions. This combination of approaches allows V&V of the HRI task at different levels of modelling detail and thoroughness of exploration, thus overcoming the individual limitations of each technique. Should the resulting V&V evidence present discrepancies, an iterative process between the different V&V techniques takes place until corroboration between the V&V techniques is gained from refining and improving the assets (i.e., system and requirement models) to represent the HRI task in a more truthful manner. Therefore, corroborative V&V affords a systematic approach to 'meta-V&V,' in which different V&V techniques can be used to corroborate and check one another, increasing the level of certainty in the results of V&V.