 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeuristic Transformer: Belief Augmented In-Context Reinforcement Learning
Nov 13, 2025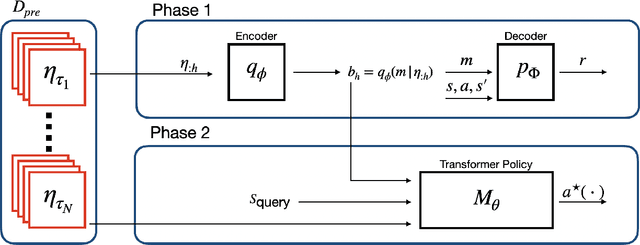
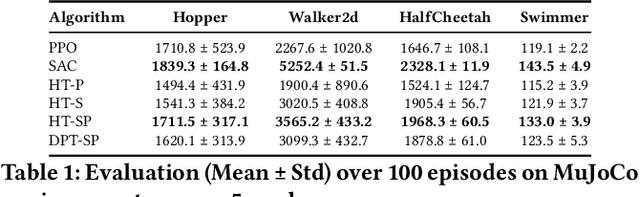

Transformers have demonstrated exceptional in-context learning (ICL) capabilities, enabling applications across natural language processing, computer vision, and sequential decision-making. In reinforcement learning, ICL reframes learning as a supervised problem, facilitating task adaptation without parameter updates. Building on prior work leveraging transformers for sequential decision-making, we propose Heuristic Transformer (HT), an in-context reinforcement learning (ICRL) approach that augments the in-context dataset with a belief distribution over rewards to achieve better decision-making. Using a variational auto-encoder (VAE), a low-dimensional stochastic variable is learned to represent the posterior distribution over rewards, which is incorporated alongside an in-context dataset and query states as prompt to the transformer policy. We assess the performance of HT across the Darkroom, Miniworld, and MuJoCo environments, showing that it consistently surpasses comparable baselines in terms of both effectiveness and generalization. Our method presents a promising direction to bridge the gap between belief-based augmentations and transformer-based decision-making.
Online Transition-Based Feature Generation for Anomaly Detection in Concurrent Data Streams
Aug 17, 2023
In this paper, we introduce the transition-based feature generator (TFGen) technique, which reads general activity data with attributes and generates step-by-step generated data. The activity data may consist of network activity from packets, system calls from processes or classified activity from surveillance cameras. TFGen processes data online and will generate data with encoded historical data for each incoming activity with high computational efficiency. The input activities may concurrently originate from distinct traces or channels. The technique aims to address issues such as domain-independent applicability, the ability to discover global process structures, the encoding of time-series data, and online processing capability.
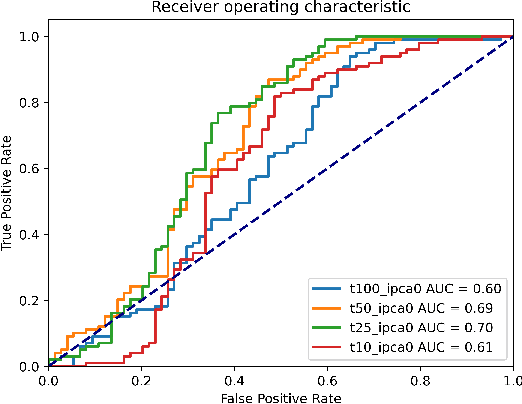
Machine learning discovers invariants of braids and flat braids
Jul 22, 2023We use machine learning to classify examples of braids (or flat braids) as trivial or non-trivial. Our ML takes form of supervised learning using neural networks (multilayer perceptrons). When they achieve good results in classification, we are able to interpret their structure as mathematical conjectures and then prove these conjectures as theorems. As a result, we find new convenient invariants of braids, including a complete invariant of flat braids.
An application of neural networks to a problem in knot theory and group theory
Jun 10, 2022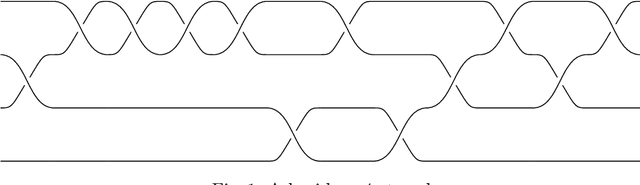
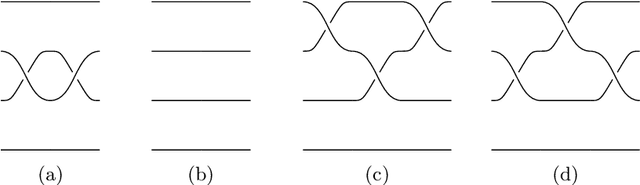
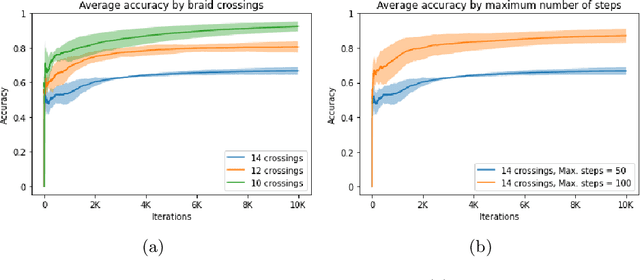
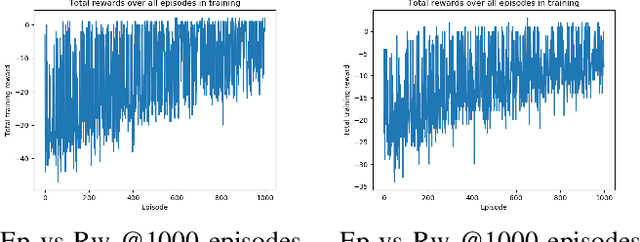
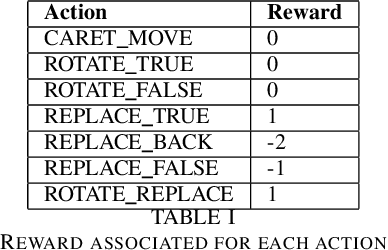
We report on our success on solving the problem of untangling braids up to length 20 and width 4. We use feed-forward neural networks in the framework of reinforcement learning to train the agent to choose Reidemeister moves to untangle braids in the minimal number of moves.
Logic Rules Meet Deep Learning: A Novel Approach for Ship Type Classification
Nov 01, 2021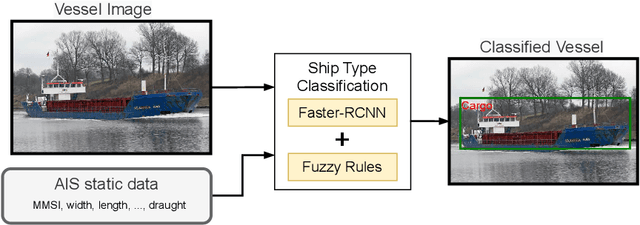
The shipping industry is an important component of the global trade and economy, however in order to ensure law compliance and safety it needs to be monitored. In this paper, we present a novel Ship Type classification model that combines vessel transmitted data from the Automatic Identification System, with vessel imagery. The main components of our approach are the Faster R-CNN Deep Neural Network and a Neuro-Fuzzy system with IF-THEN rules. We evaluate our model using real world data and showcase the advantages of this combination while also compare it with other methods. Results show that our model can increase prediction scores by up to 15.4\% when compared with the next best model we considered, while also maintaining a level of explainability as opposed to common black box approaches.
Untangling Braids with Multi-agent Q-Learning
Sep 29, 2021

We use reinforcement learning to tackle the problem of untangling braids. We experiment with braids with 2 and 3 strands. Two competing players learn to tangle and untangle a braid. We interface the braid untangling problem with the OpenAI Gym environment, a widely used way of connecting agents to reinforcement learning problems. The results provide evidence that the more we train the system, the better the untangling player gets at untangling braids. At the same time, our tangling player produces good examples of tangled braids.
Representation and Processing of Instantaneous and Durative Temporal Phenomena
Aug 27, 2021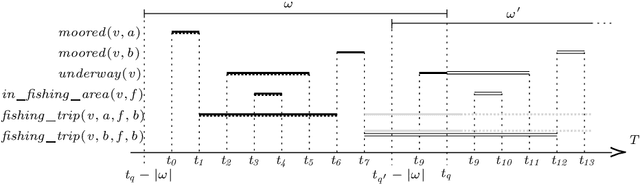
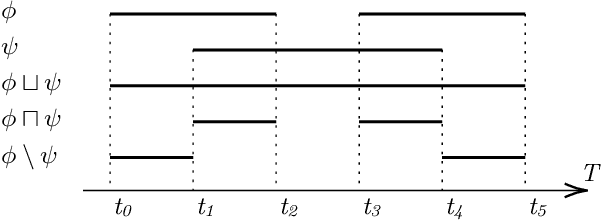
Event definitions in Complex Event Processing systems are constrained by the expressiveness of each system's language. Some systems allow the definition of instantaneous complex events, while others allow the definition of durative complex events. While there are exceptions that offer both options, they often lack of intervals relations such as those specified by the Allen's interval algebra. In this paper, we propose a new logic based temporal phenomena definition language, specifically tailored for Complex Event Processing, that allows the representation of both instantaneous and durative phenomena and the temporal relations between them. Moreover, we demonstrate the expressiveness of our proposed language by employing a maritime use case where we define maritime events of interest. Finally, we analyse the execution semantics of our proposed language for stream processing and introduce the `Phenesthe' implementation prototype.
Modular Verification of Autonomous Space Robotics
Aug 28, 2019
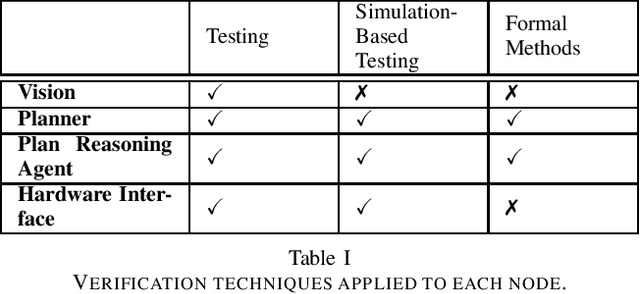
Ensuring that autonomous space robot control software behaves as it should is crucial, particularly as software failure in space often equates to mission failure and could potentially endanger nearby astronauts and costly equipment. To minimise mission failure caused by software errors, we can utilise a variety of tools and techniques to verify that the software behaves as intended. In particular, distinct nodes in a robotic system often require different verification techniques to ensure that they behave as expected. This paper introduces a method for integrating the various verification techniques that are applied to robotic software, via a First-Order Logic (FOL) specification that captures each node's assumptions and guarantees. These FOL specifications are then used to guide the verification of the individual nodes, be it by testing or the use of a formal method. We also outline a way of measuring our confidence in the verification of the entire system in terms of the verification techniques used.
Agent Based Approaches to Engineering Autonomous Space Software
Mar 02, 2010
Current approaches to the engineering of space software such as satellite control systems are based around the development of feedback controllers using packages such as MatLab's Simulink toolbox. These provide powerful tools for engineering real time systems that adapt to changes in the environment but are limited when the controller itself needs to be adapted. We are investigating ways in which ideas from temporal logics and agent programming can be integrated with the use of such control systems to provide a more powerful layer of autonomous decision making. This paper will discuss our initial approaches to the engineering of such systems.
* 3 pages, 1 Figure, Formal Methods in Aerospace
Temporal logic with predicate abstraction
Oct 27, 2004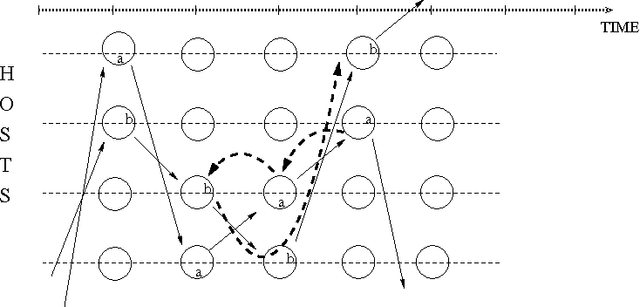
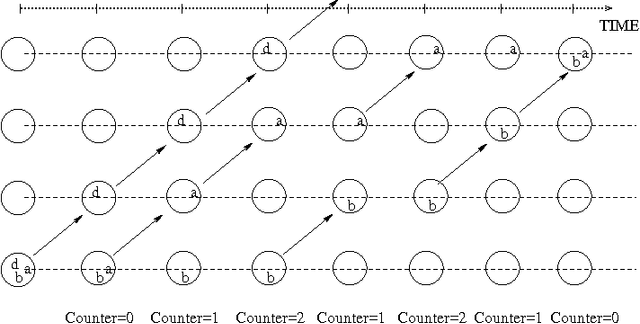
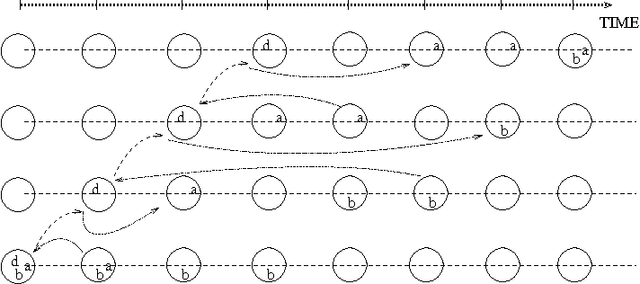
A predicate linear temporal logic LTL_{\lambda,=} without quantifiers but with predicate abstraction mechanism and equality is considered. The models of LTL_{\lambda,=} can be naturally seen as the systems of pebbles (flexible constants) moving over the elements of some (possibly infinite) domain. This allows to use LTL_{\lambda,=} for the specification of dynamic systems using some resources, such as processes using memory locations, mobile agents occupying some sites, etc. On the other hand we show that LTL_{\lambda,=} is not recursively axiomatizable and, therefore, fully automated verification of LTL_{\lambda,=} specifications is not, in general, possible.