 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Human-Swarm Interaction based on Workload Measurement using Functional Near-Infrared Spectroscopy
May 13, 2024One of the challenges of human-swarm interaction (HSI) is how to manage the operator's workload. In order to do this, we propose a novel neurofeedback technique for the real-time measurement of workload using functional near-infrared spectroscopy (fNIRS). The objective is to develop a baseline for workload measurement in human-swarm interaction using fNIRS and to develop an interface that dynamically adapts to the operator's workload. The proposed method consists of using fNIRS device to measure brain activity, process this through a machine learning algorithm, and pass it on to the HSI interface. By dynamically adapting the HSI interface, the swarm operator's workload could be reduced and the performance improved.
Hierarchical Distribution-Aware Testing of Deep Learning
May 17, 2022
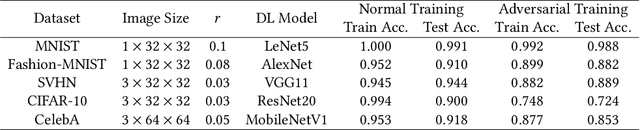
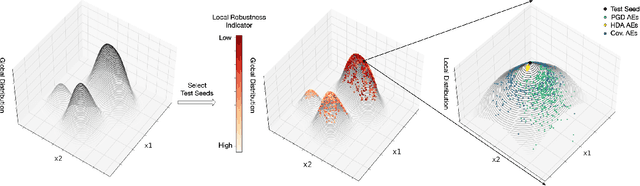
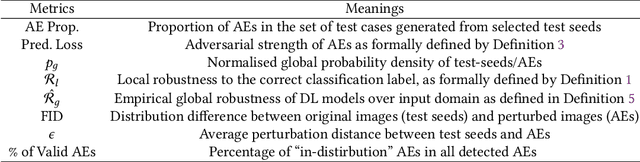
With its growing use in safety/security-critical applications, Deep Learning (DL) has raised increasing concerns regarding its dependability. In particular, DL has a notorious problem of lacking robustness. Despite recent efforts made in detecting Adversarial Examples (AEs) via state-of-the-art attacking and testing methods, they are normally input distribution agnostic and/or disregard the perception quality of AEs. Consequently, the detected AEs are irrelevant inputs in the application context or unnatural/unrealistic that can be easily noticed by humans. This may lead to a limited effect on improving the DL model's dependability, as the testing budget is likely to be wasted on detecting AEs that are encountered very rarely in its real-life operations. In this paper, we propose a new robustness testing approach for detecting AEs that considers both the input distribution and the perceptual quality of inputs. The two considerations are encoded by a novel hierarchical mechanism. First, at the feature level, the input data distribution is extracted and approximated by data compression techniques and probability density estimators. Such quantified feature level distribution, together with indicators that are highly correlated with local robustness, are considered in selecting test seeds. Given a test seed, we then develop a two-step genetic algorithm for local test case generation at the pixel level, in which two fitness functions work alternatively to control the quality of detected AEs. Finally, extensive experiments confirm that our holistic approach considering hierarchical distributions at feature and pixel levels is superior to state-of-the-arts that either disregard any input distribution or only consider a single (non-hierarchical) distribution, in terms of not only the quality of detected AEs but also improving the overall robustness of the DL model under testing.
Reliability Assessment and Safety Arguments for Machine Learning Components in Assuring Learning-Enabled Autonomous Systems
Nov 30, 2021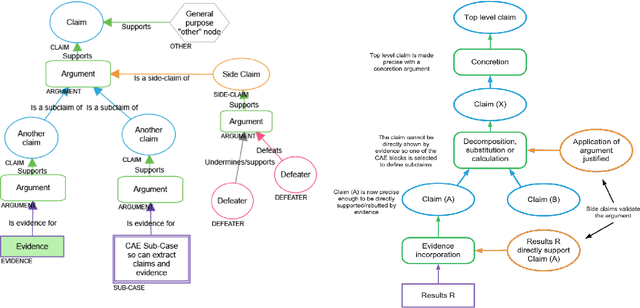

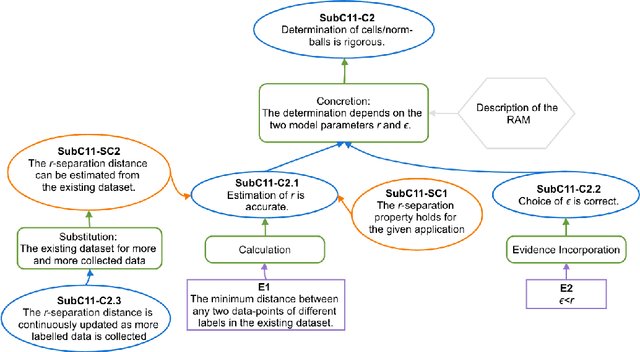
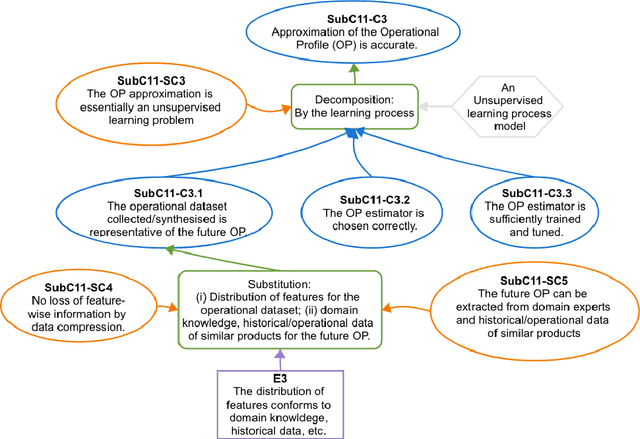
The increasing use of Machine Learning (ML) components embedded in autonomous systems -- so-called Learning-Enabled Systems (LES) -- has resulted in the pressing need to assure their functional safety. As for traditional functional safety, the emerging consensus within both, industry and academia, is to use assurance cases for this purpose. Typically assurance cases support claims of reliability in support of safety, and can be viewed as a structured way of organising arguments and evidence generated from safety analysis and reliability modelling activities. While such assurance activities are traditionally guided by consensus-based standards developed from vast engineering experience, LES pose new challenges in safety-critical application due to the characteristics and design of ML models. In this article, we first present an overall assurance framework for LES with an emphasis on quantitative aspects, e.g., breaking down system-level safety targets to component-level requirements and supporting claims stated in reliability metrics. We then introduce a novel model-agnostic Reliability Assessment Model (RAM) for ML classifiers that utilises the operational profile and robustness verification evidence. We discuss the model assumptions and the inherent challenges of assessing ML reliability uncovered by our RAM and propose practical solutions. Probabilistic safety arguments at the lower ML component-level are also developed based on the RAM. Finally, to evaluate and demonstrate our methods, we not only conduct experiments on synthetic/benchmark datasets but also demonstrate the scope of our methods with a comprehensive case study on Autonomous Underwater Vehicles in simulation.
Assessing the Reliability of Deep Learning Classifiers Through Robustness Evaluation and Operational Profiles
Jun 02, 2021

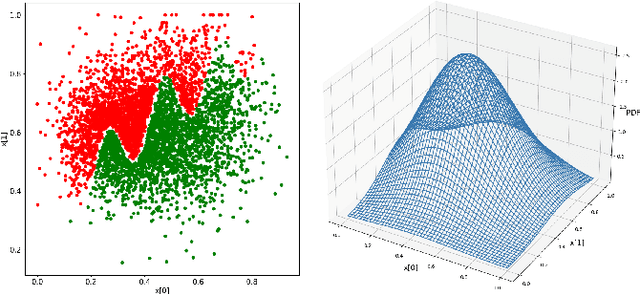
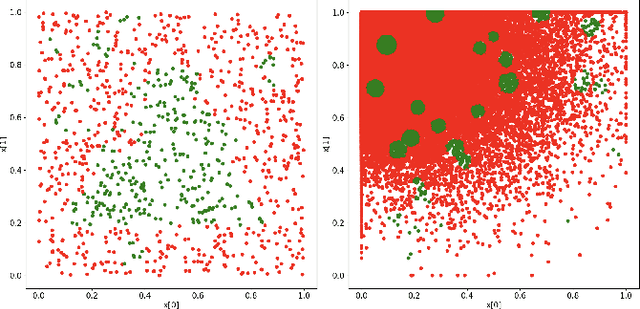
The utilisation of Deep Learning (DL) is advancing into increasingly more sophisticated applications. While it shows great potential to provide transformational capabilities, DL also raises new challenges regarding its reliability in critical functions. In this paper, we present a model-agnostic reliability assessment method for DL classifiers, based on evidence from robustness evaluation and the operational profile (OP) of a given application. We partition the input space into small cells and then "assemble" their robustness (to the ground truth) according to the OP, where estimators on the cells' robustness and OPs are provided. Reliability estimates in terms of the probability of misclassification per input (pmi) can be derived together with confidence levels. A prototype tool is demonstrated with simplified case studies. Model assumptions and extension to real-world applications are also discussed. While our model easily uncovers the inherent difficulties of assessing the DL dependability (e.g. lack of data with ground truth and scalability issues), we provide preliminary/compromised solutions to advance in this research direction.
Formal Verification of Robustness and Resilience of Learning-Enabled State Estimation Systems for Robotics
Oct 16, 2020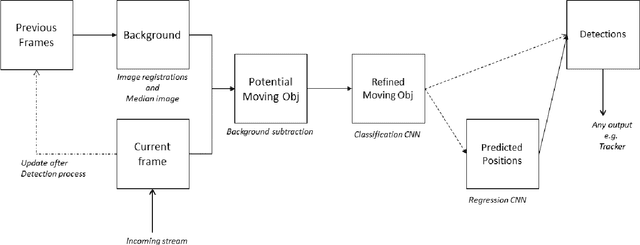


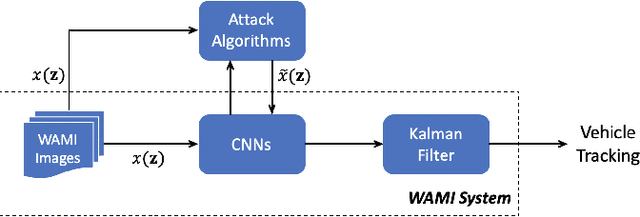
This paper presents a formal verification guided approach for a principled design and implementation of robust and resilient learning-enabled systems. We focus on learning-enabled state estimation systems (LE-SESs), which have been widely used in robotics applications to determine the current state (e.g., location, speed, direction, etc.) of a complex system. The LE-SESs are networked systems composed of a set of connected components including Bayes filters for localisation, and neural networks for processing sensory input. We study LE-SESs from the perspective of formal verification, which determines the satisfiability of a system model against the specified properties. Over LE-SESs, we investigate two key properties - robustness and resilience - and provide their formal definitions. To enable formal verification, we reduce the LE-SESs to a novel class of labelled transition systems, named {PO}2-LTS in the paper, and formally express the properties as constrained optimisation objectives. We prove that the robustness verification is NP-complete. Based on {PO}2-LTS and the optimisation objectives, practical verification algorithms are developed to check the satisfiability of the properties on the LE-SESs. As a major case study, we interrogate a real-world dynamic tracking system which uses a single Kalman Filter (KF) - a special case of Bayes filter - to localise and track a ground vehicle. Its perception system, based on convolutional neural networks, processes a high-resolution Wide Area Motion Imagery (WAMI) data stream. Experimental results show that our algorithms can not only verify the properties of the WAMI tracking system but also provide representative examples, the latter of which inspired us to take an enhanced LE-SESs design where runtime monitors or joint-KFs are required. Experimental results confirm the improvement of the robustness of the enhanced design.
A Safety Framework for Critical Systems Utilising Deep Neural Networks
Mar 07, 2020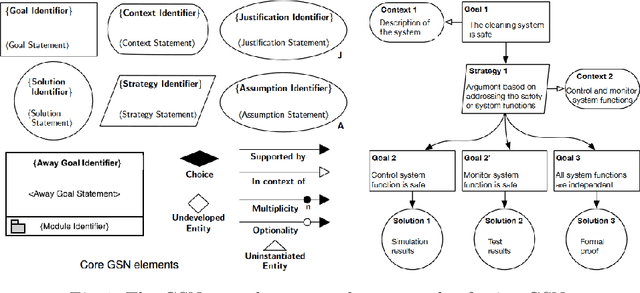
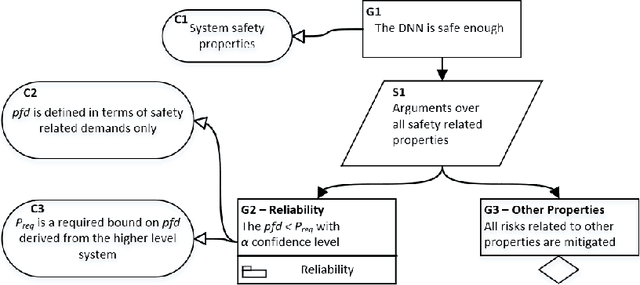
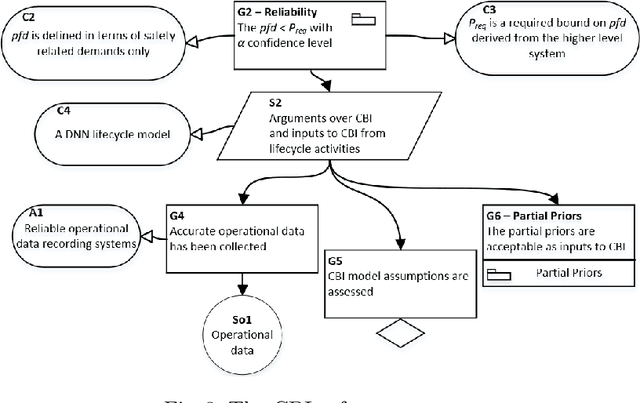
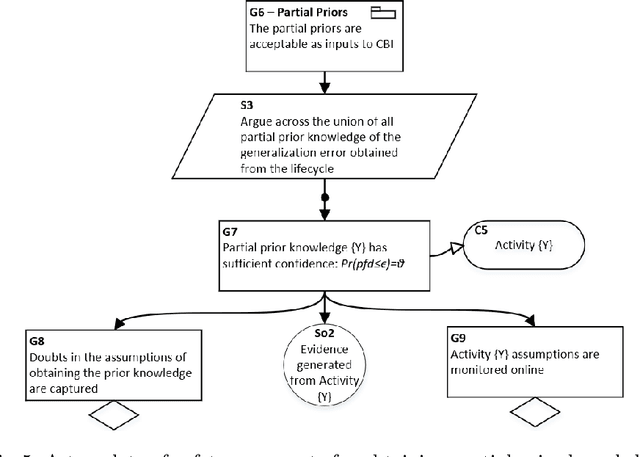
Increasingly sophisticated mathematical modelling processes from Machine Learning are being used to analyse complex data. However, the performance and explainability of these models within practical critical systems requires a rigorous and continuous verification of their safe utilisation. Working towards addressing this challenge, this paper presents a principled novel safety argument framework for critical systems that utilise deep neural networks. The approach allows various forms of predictions, e.g., future reliability of passing some demands, or confidence on a required reliability level. It is supported by a Bayesian analysis using operational data and the recent verification and validation techniques for deep learning. The prediction is conservative -- it starts with partial prior knowledge obtained from lifecycle activities and then determines the worst-case prediction. Open challenges are also identified.