 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMARLIN: Multi-Agent Reinforcement Learning Guided by Language-Based Inter-Robot Negotiation
Oct 18, 2024Multi-agent reinforcement learning is a key method for training multi-robot systems over a series of episodes in which robots are rewarded or punished according to their performance; only once the system is trained to a suitable standard is it deployed in the real world. If the system is not trained enough, the task will likely not be completed and could pose a risk to the surrounding environment. Therefore, reaching high performance in a shorter training period can lead to significant reductions in time and resource consumption. We introduce Multi-Agent Reinforcement Learning guided by Language-based Inter-Robot Negotiation (MARLIN), which makes the training process both faster and more transparent. We equip robots with large language models that negotiate and debate the task, producing a plan that is used to guide the policy during training. We dynamically switch between using reinforcement learning and the negotiation-based approach throughout training. This offers an increase in training speed when compared to standard multi-agent reinforcement learning and allows the system to be deployed to physical hardware earlier. As robots negotiate in natural language, we can better understand the behaviour of the robots individually and as a collective. We compare the performance of our approach to multi-agent reinforcement learning and a large language model to show that our hybrid method trains faster at little cost to performance.
Mapping Safe Zones for Co-located Human-UAV Interaction
Sep 03, 2024



Recent advances in robotics bring us closer to the reality of living, co-habiting, and sharing personal spaces with robots. However, it is not clear how close a co-located robot can be to a human in a shared environment without making the human uncomfortable or anxious. This research aims to map safe and comfortable zones for co-located aerial robots. The objective is to identify the distances at which a drone causes discomfort to a co-located human and to create a map showing no-fly, moderate-fly, and safe-fly zones. We recruited a total of 18 participants and conducted two indoor laboratory experiments, one with a single drone and the other set with two drones. Our results show that multiple drones cause more discomfort when close to a co-located human than a single drone. We observed that distances below 200 cm caused discomfort, the moderate fly zone was 200 - 300 cm, and the safe-fly zone was any distance greater than 300 cm in single drone experiments. The safe zones were pushed further away by 100 cm for the multiple drone experiments. In this paper, we present the preliminary findings on safe-fly zones for multiple drones. Further work would investigate the impact of a higher number of aerial robots, the speed of approach, direction of travel, and noise level on co-located humans, and autonomously develop 3D models of trust zones and safe zones for co-located aerial swarms.
Trade-offs of Dynamic Control Structure in Human-swarm Systems
Aug 05, 2024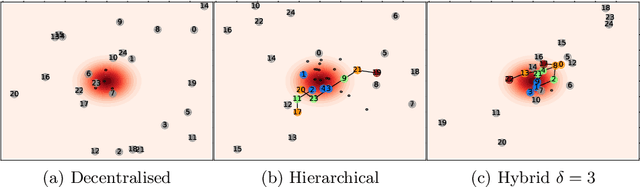



Swarm robotics is a study of simple robots that exhibit complex behaviour only by interacting locally with other robots and their environment. The control in swarm robotics is mainly distributed whereas centralised control is widely used in other fields of robotics. Centralised and decentralised control strategies both pose a unique set of benefits and drawbacks for the control of multi-robot systems. While decentralised systems are more scalable and resilient, they are less efficient compared to the centralised systems and they lead to excessive data transmissions to the human operators causing cognitive overload. We examine the trade-offs of each of these approaches in a human-swarm system to perform an environmental monitoring task and propose a flexible hybrid approach, which combines elements of hierarchical and decentralised systems. We find that a flexible hybrid system can outperform a centralised system (in our environmental monitoring task by 19.2%) while reducing the number of messages sent to a human operator (here by 23.1%). We conclude that establishing centralisation for a system is not always optimal for performance and that utilising aspects of centralised and decentralised systems can keep the swarm from hindering its performance.
Learning to Imitate Spatial Organization in Multi-robot Systems
Jul 16, 2024

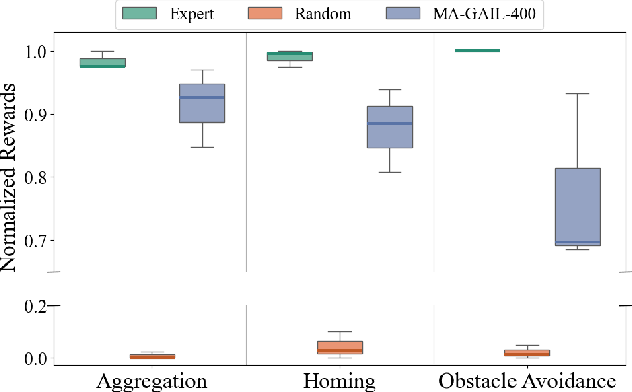

Understanding collective behavior and how it evolves is important to ensure that robot swarms can be trusted in a shared environment. One way to understand the behavior of the swarm is through collective behavior reconstruction using prior demonstrations. Existing approaches often require access to the swarm controller which may not be available. We reconstruct collective behaviors in distinct swarm scenarios involving shared environments without using swarm controller information. We achieve this by transforming prior demonstrations into features that sufficiently describe multi-agent interactions before behavior reconstruction with multi-agent generative adversarial imitation learning (MA-GAIL). We show that our approach outperforms existing algorithms in all investigated swarm scenarios, and can be used to observe and reconstruct a swarm's behavior for further analysis and testing, which might be impractical or undesirable on the original robot swarm.
A Survey of Language-Based Communication in Robotics
Jun 06, 2024



Embodied robots which can interact with their environment and neighbours are increasingly being used as a test case to develop Artificial Intelligence. This creates a need for multimodal robot controllers which can operate across different types of information including text. Large Language Models are able to process and generate textual as well as audiovisual data and, more recently, robot actions. Language Models are increasingly being applied to robotic systems; these Language-Based robots leverage the power of language models in a variety of ways. Additionally, the use of language opens up multiple forms of information exchange between members of a human-robot team. This survey motivates the use of language models in robotics, and then delineates works based on the part of the overall control flow in which language is incorporated. Language can be used by human to task a robot, by a robot to inform a human, between robots as a human-like communication medium, and internally for a robot's planning and control. Applications of language-based robots are explored, and finally numerous limitations and challenges are discussed to provide a summary of the development needed for language-based robotics moving forward. Links to each paper and, if available, source code are made available in the accompanying site at https://uos-haris.online/sooratilab/papers/WillSurvey/LangRobotSurvey.php
Adaptive Human-Swarm Interaction based on Workload Measurement using Functional Near-Infrared Spectroscopy
May 13, 2024One of the challenges of human-swarm interaction (HSI) is how to manage the operator's workload. In order to do this, we propose a novel neurofeedback technique for the real-time measurement of workload using functional near-infrared spectroscopy (fNIRS). The objective is to develop a baseline for workload measurement in human-swarm interaction using fNIRS and to develop an interface that dynamically adapts to the operator's workload. The proposed method consists of using fNIRS device to measure brain activity, process this through a machine learning algorithm, and pass it on to the HSI interface. By dynamically adapting the HSI interface, the swarm operator's workload could be reduced and the performance improved.
Collective Decision-Making on Task Allocation Feasibility
May 13, 2024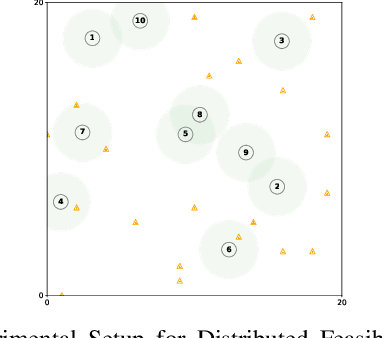
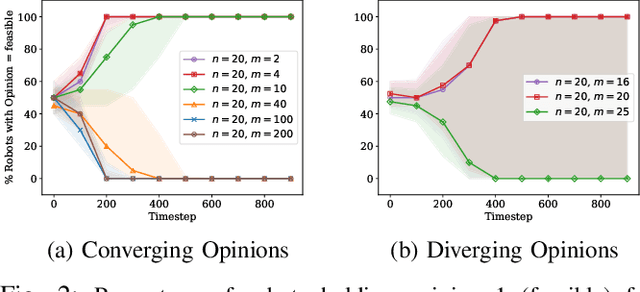
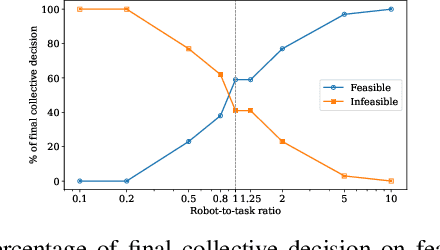
Robot swarms offer the potential to bring several advantages to the real-world applications but deploying them presents challenges in ensuring feasibility across diverse environments. Assessing the feasibility of new tasks for swarms is crucial to ensure the effective utilisation of resources, as well as to provide awareness of the suitability of a swarm solution for a particular task. In this paper, we introduce the concept of distributed feasibility, where the swarm collectively assesses the feasibility of task allocation based on local observations and interactions. We apply Direct Modulation of Majority-based Decisions as our collective decision-making strategy and show that, in a homogeneous setting, the swarm is able to collectively decide whether a given setup has a high or low feasibility as long as the robot-to-task ratio is not near one.
Conversational Language Models for Human-in-the-Loop Multi-Robot Coordination
Feb 29, 2024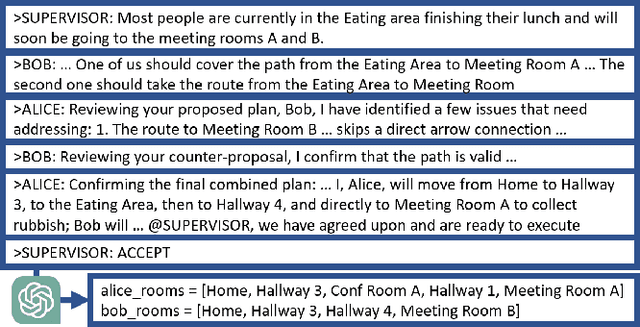
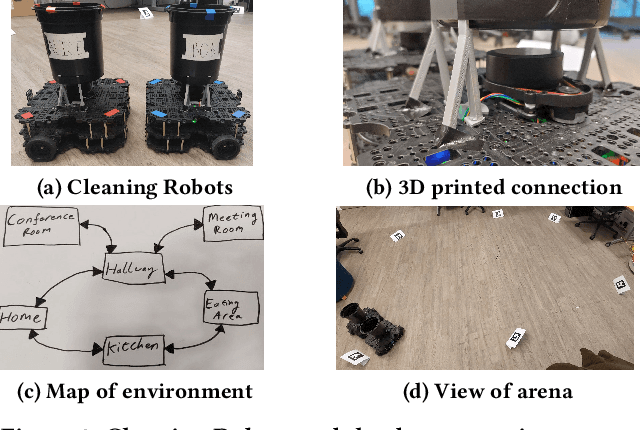
With the increasing prevalence and diversity of robots interacting in the real world, there is need for flexible, on-the-fly planning and cooperation. Large Language Models are starting to be explored in a multimodal setup for communication, coordination, and planning in robotics. Existing approaches generally use a single agent building a plan, or have multiple homogeneous agents coordinating for a simple task. We present a decentralised, dialogical approach in which a team of agents with different abilities plans solutions through peer-to-peer and human-robot discussion. We suggest that argument-style dialogues are an effective way to facilitate adaptive use of each agent's abilities within a cooperative team. Two robots discuss how to solve a cleaning problem set by a human, define roles, and agree on paths they each take. Each step can be interrupted by a human advisor and agents check their plans with the human. Agents then execute this plan in the real world, collecting rubbish from people in each room. Our implementation uses text at every step, maintaining transparency and effective human-multi-robot interaction.
The Effect of Predictive Formal Modelling at Runtime on Performance in Human-Swarm Interaction
Jan 22, 2024Formal Modelling is often used as part of the design and testing process of software development to ensure that components operate within suitable bounds even in unexpected circumstances. In this paper, we use predictive formal modelling (PFM) at runtime in a human-swarm mission and show that this integration can be used to improve the performance of human-swarm teams. We recruited 60 participants to operate a simulated aerial swarm to deliver parcels to target locations. In the PFM condition, operators were informed of the estimated completion times given the number of drones deployed, whereas in the No-PFM condition, operators did not have this information. The operators could control the mission by adding or removing drones from the mission and thereby, increasing or decreasing the overall mission cost. The evaluation of human-swarm performance relied on four key metrics: the time taken to complete tasks, the number of agents involved, the total number of tasks accomplished, and the overall cost associated with the human-swarm task. Our results show that PFM modelling at runtime improves mission performance without significantly affecting the operator's workload or the system's usability.
Outlining the design space of eXplainable swarm (xSwarm): experts perspective
Sep 03, 2023


In swarm robotics, agents interact through local roles to solve complex tasks beyond an individual's ability. Even though swarms are capable of carrying out some operations without the need for human intervention, many safety-critical applications still call for human operators to control and monitor the swarm. There are novel challenges to effective Human-Swarm Interaction (HSI) that are only beginning to be addressed. Explainability is one factor that can facilitate effective and trustworthy HSI and improve the overall performance of Human-Swarm team. Explainability was studied across various Human-AI domains, such as Human-Robot Interaction and Human-Centered ML. However, it is still ambiguous whether explanations studied in Human-AI literature would be beneficial in Human-Swarm research and development. Furthermore, the literature lacks foundational research on the prerequisites for explainability requirements in swarm robotics, i.e., what kind of questions an explainable swarm is expected to answer, and what types of explanations a swarm is expected to generate. By surveying 26 swarm experts, we seek to answer these questions and identify challenges experts faced to generate explanations in Human-Swarm environments. Our work contributes insights into defining a new area of research of eXplainable Swarm (xSwarm) which looks at how explainability can be implemented and developed in swarm systems. This paper opens the discussion on xSwarm and paves the way for more research in the field.