 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrade-offs of Dynamic Control Structure in Human-swarm Systems
Aug 05, 2024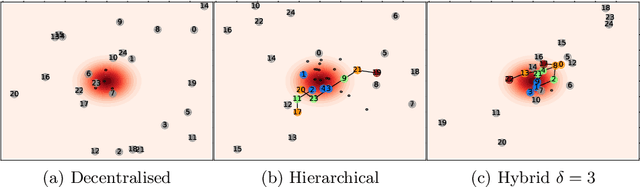



Swarm robotics is a study of simple robots that exhibit complex behaviour only by interacting locally with other robots and their environment. The control in swarm robotics is mainly distributed whereas centralised control is widely used in other fields of robotics. Centralised and decentralised control strategies both pose a unique set of benefits and drawbacks for the control of multi-robot systems. While decentralised systems are more scalable and resilient, they are less efficient compared to the centralised systems and they lead to excessive data transmissions to the human operators causing cognitive overload. We examine the trade-offs of each of these approaches in a human-swarm system to perform an environmental monitoring task and propose a flexible hybrid approach, which combines elements of hierarchical and decentralised systems. We find that a flexible hybrid system can outperform a centralised system (in our environmental monitoring task by 19.2%) while reducing the number of messages sent to a human operator (here by 23.1%). We conclude that establishing centralisation for a system is not always optimal for performance and that utilising aspects of centralised and decentralised systems can keep the swarm from hindering its performance.
Collective Decision Making in Communication-Constrained Environments
Jul 19, 2022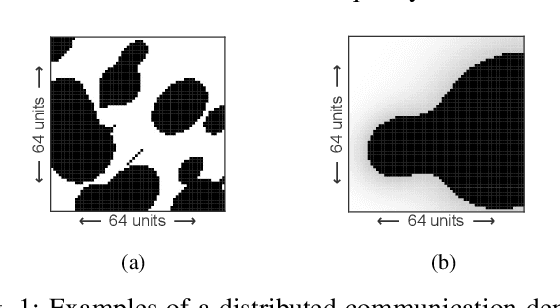
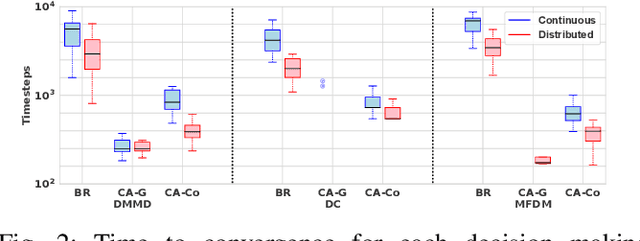
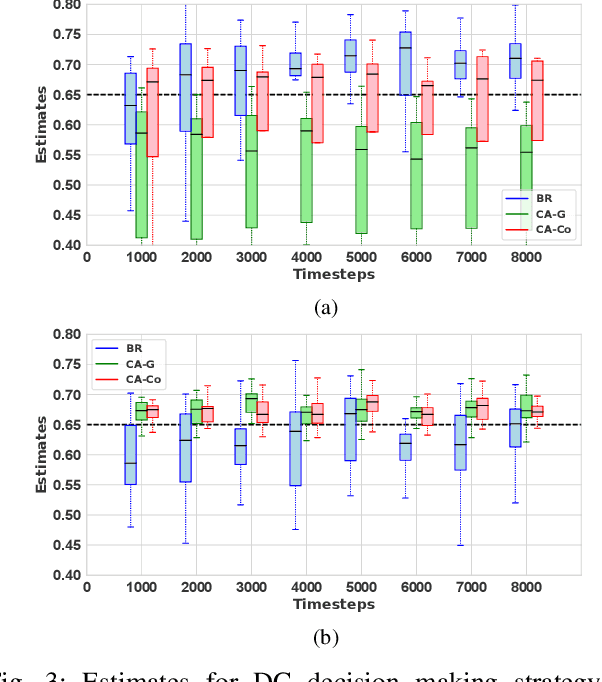
One of the main tasks for autonomous robot swarms is to collectively decide on the best available option. Achieving that requires a high quality communication between the agents that may not be always available in a real world environment. In this paper we introduce the communication-constrained collective decision-making problem where some areas of the environment limit the agents' ability to communicate, either by reducing success rate or blocking the communication channels. We propose a decentralised algorithm for mapping environmental features for robot swarms as well as improving collective decision making in communication-limited environments without prior knowledge of the communication landscape. Our results show that making a collective aware of the communication environment can improve the speed of convergence in the presence of communication limitations, at least 3 times faster, without sacrificing accuracy.