 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBlind-Wayfarer: A Minimalist, Probing-Driven Framework for Resilient Navigation in Perception-Degraded Environments
Mar 10, 2025Navigating autonomous robots through dense forests and rugged terrains is especially daunting when exteroceptive sensors -- such as cameras and LiDAR sensors -- fail under occlusions, low-light conditions, or sensor noise. We present Blind-Wayfarer, a probing-driven navigation framework inspired by maze-solving algorithms that relies primarily on a compass to robustly traverse complex, unstructured environments. In 1,000 simulated forest experiments, Blind-Wayfarer achieved a 99.7% success rate. In real-world tests in two distinct scenarios -- with rover platforms of different sizes -- our approach successfully escaped forest entrapments in all 20 trials. Remarkably, our framework also enabled a robot to escape a dense woodland, traveling from 45 m inside the forest to a paved pathway at its edge. These findings highlight the potential of probing-based methods for reliable navigation in challenging perception-degraded field conditions. Videos and code are available on our website https://sites.google.com/view/blind-wayfarer
Trade-offs of Dynamic Control Structure in Human-swarm Systems
Aug 05, 2024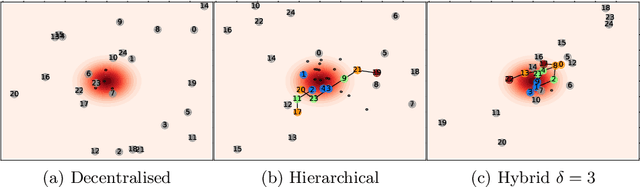



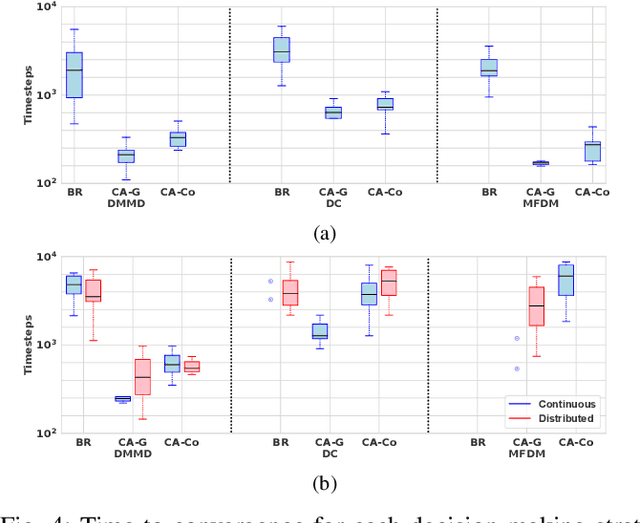
Swarm robotics is a study of simple robots that exhibit complex behaviour only by interacting locally with other robots and their environment. The control in swarm robotics is mainly distributed whereas centralised control is widely used in other fields of robotics. Centralised and decentralised control strategies both pose a unique set of benefits and drawbacks for the control of multi-robot systems. While decentralised systems are more scalable and resilient, they are less efficient compared to the centralised systems and they lead to excessive data transmissions to the human operators causing cognitive overload. We examine the trade-offs of each of these approaches in a human-swarm system to perform an environmental monitoring task and propose a flexible hybrid approach, which combines elements of hierarchical and decentralised systems. We find that a flexible hybrid system can outperform a centralised system (in our environmental monitoring task by 19.2%) while reducing the number of messages sent to a human operator (here by 23.1%). We conclude that establishing centralisation for a system is not always optimal for performance and that utilising aspects of centralised and decentralised systems can keep the swarm from hindering its performance.
Collective Decision Making in Communication-Constrained Environments
Jul 19, 2022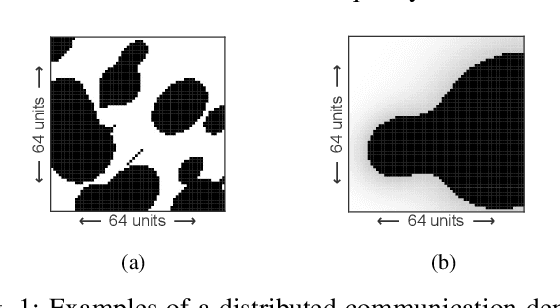
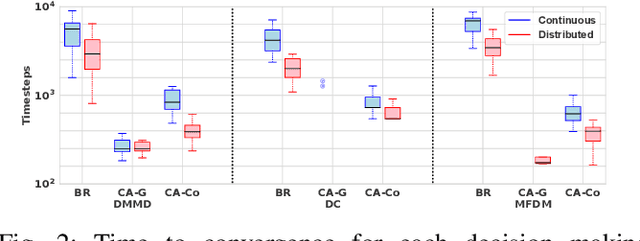
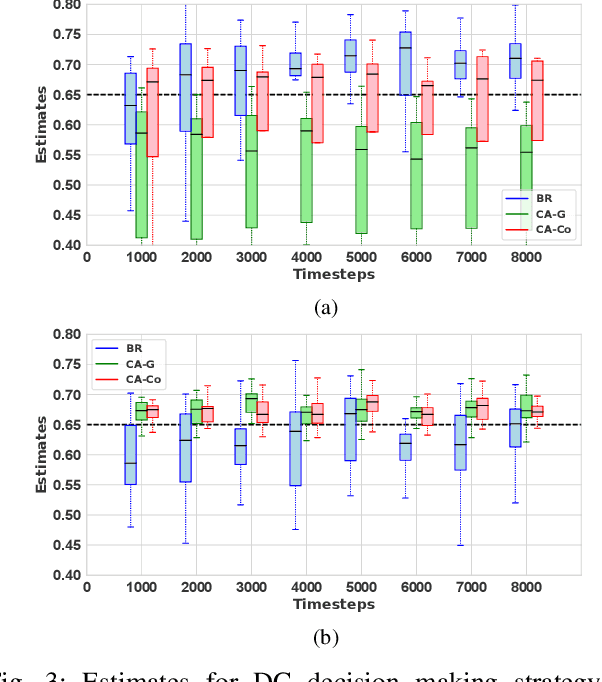
One of the main tasks for autonomous robot swarms is to collectively decide on the best available option. Achieving that requires a high quality communication between the agents that may not be always available in a real world environment. In this paper we introduce the communication-constrained collective decision-making problem where some areas of the environment limit the agents' ability to communicate, either by reducing success rate or blocking the communication channels. We propose a decentralised algorithm for mapping environmental features for robot swarms as well as improving collective decision making in communication-limited environments without prior knowledge of the communication landscape. Our results show that making a collective aware of the communication environment can improve the speed of convergence in the presence of communication limitations, at least 3 times faster, without sacrificing accuracy.
Depth estimation on embedded computers for robot swarms in forest
Dec 05, 2020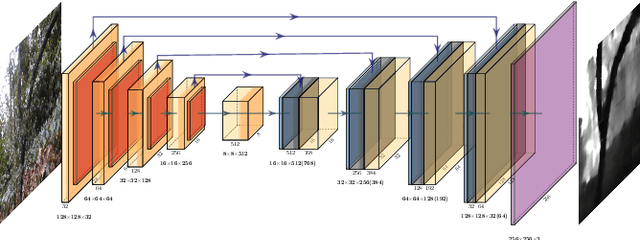
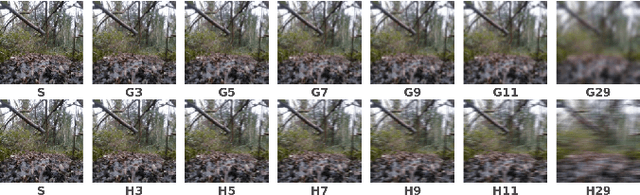
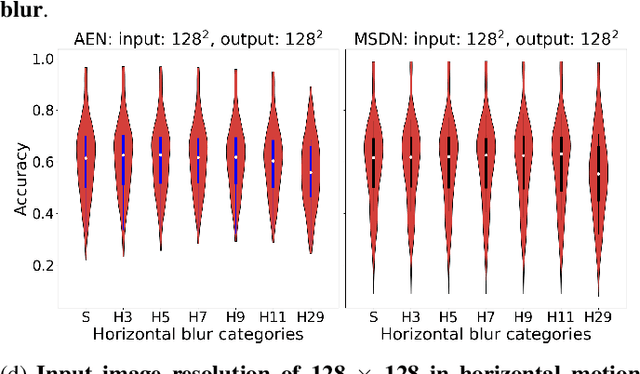
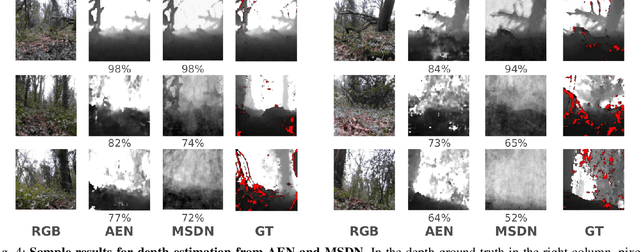
Robot swarms to date are not prepared for autonomous navigation such as path planning and obstacle detection in forest floor, unable to achieve low-cost. The development of depth sensing and embedded computing hardware paves the way for swarm of terrestrial robots. The goal of this research is to improve this situation by developing low cost vision system for small ground robots to rapidly perceive terrain. We develop two depth estimation models and evaluate their performance on Raspberry Pi 4 and Jetson Nano in terms of accuracy, runtime and model size of depth estimation models, as well as memory consumption, power draw, temperature, and cost of above two embedded on-board computers. Our research demonstrated that auto-encoder network deployed on Raspberry Pi 4 runs at a power consumption of 3.4 W, memory consumption of about 200 MB, and mean runtime of 13 ms. This can be to meet our requirement for low-cost swarm of robots. Moreover, our analysis also indicated multi-scale deep network performs better for predicting depth map from blurred RGB images caused by camera motion. This paper mainly describes depth estimation models trained on our own dataset recorded in forest, and their performance on embedded on-board computers.
Low-viewpoint forest depth dataset for sparse rover swarms
Mar 09, 2020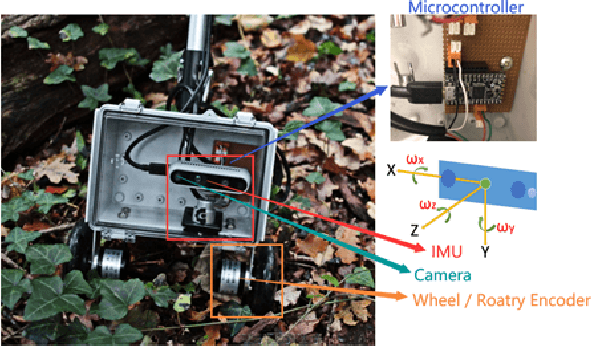
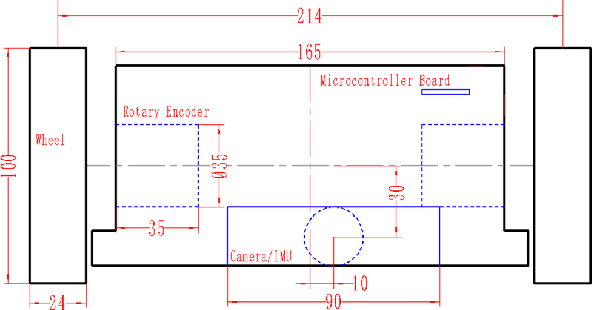
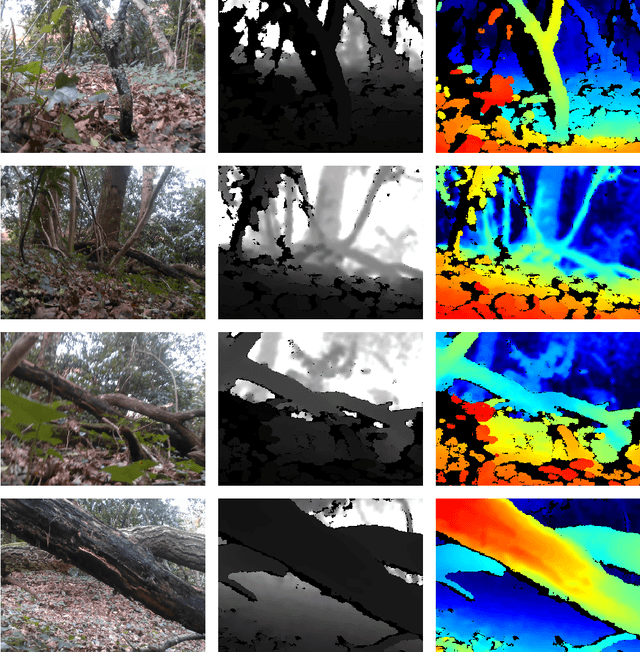
Rapid progress in embedded computing hardware increasingly enables on-board image processing on small robots. This development opens the path to replacing costly sensors with sophisticated computer vision techniques. A case in point is the prediction of scene depth information from a monocular camera for autonomous navigation. Motivated by the aim to develop a robot swarm suitable for sensing, monitoring, and search applications in forests, we have collected a set of RGB images and corresponding depth maps. Over 100k images were recorded with a custom rig from the perspective of a small ground rover moving through a forest. Taken under different weather and lighting conditions, the images include scenes with grass, bushes, standing and fallen trees, tree branches, leafs, and dirt. In addition GPS, IMU, and wheel encoder data was recorded. From the calibrated, synchronized, aligned and timestamped frames about 9700 image-depth map pairs were selected for sharpness and variety. We provide this dataset to the community to fill a need identified in our own research and hope it will accelerate progress in robots navigating the challenging forest environment. This paper describes our custom hardware and methodology to collect the data, subsequent processing and quality of the data, and how to access it.